基于模糊控制的高靈敏GPS接收機設計

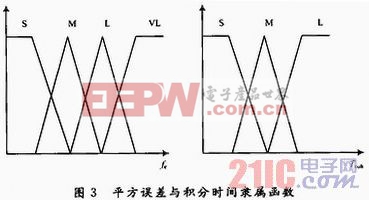
頻率跟蹤誤差設定在零和系統所容忍的最大頻差之間,相應地隸屬于4個三角函數:小(S)、中(M)、大(L)和很大(VL)。對于模糊積分時間,定義3個三角函數:大(L)、中(M)和小(S),覆蓋了積分時間的整個范圍。其中,模糊積分時間的小(S)用來處理信號從捕獲階段進入跟蹤階段后,使跟蹤誤差迅速減小,而中(M)和大(L)對應噪聲帶寬較窄的跟蹤階段。如圖3所示。本文引用地址:http://www.104case.com/article/160305.htm
ELSE規則的存在不僅確保了至少有一個規則能得到滿足,從而使得在任何輸入數據條件下都能成功地執行推理機制,而且減少了計算量。ELSE規則的引入相當于強制性地對積分時間進行修正,類似于一般變步長自適應算法中引入附加常數和初始步長序列的自適應狀態作用,它同樣受收斂速度和失調之間存在著相互矛盾的約束。為了獲得一個更小的失調和更快的收斂速度,必須選擇合理的ELSE規則。如希望收斂速度快,可以將小(S)語義項賦給ELSE規則。反之,將大(L)語義項賦給ELSE規則以獲得小的失調。算法的精度受到收斂速度和失調這兩個相互矛盾的影響,這個問題通常在實踐中按照實際需要協調收斂速度與失調指標來達到相關指標。當接收機信號通道從捕獲階段進入跟蹤階段后,先讓環路采用牽引濾波,讓其運行相對較短的積分時間,使跟蹤誤差迅速減小。然后環路再轉而采用噪聲帶寬較窄的跟蹤濾波。在不同的接收環境中通過采用此模糊控制算法,自適應調節環路參數,達到頻率誤差容忍度與環路噪聲的最佳匹配,從而實現接收機系統靈敏度的提高。
3 性能仿真與分析
3.1 數學模型
針對非相干積分值V含有均值不為零的噪聲情況,將信號的信噪比SNRSQ定義為:
SNRSQ=[E(V)-E(Vn)]2/V(Vn) (10)
式中:Vn為式(9)中的非相干積分值V在信號不存在情況下的值;分母V(Vn)則代表Vn的方差。Vn的概率密度呈瑞利分布,V的概率密度為萊斯分布。給定自相關幅值P以及噪聲nI和nQ的方差![]() ,那么非相干積分平方前的信噪比SNRcoh為:
,那么非相干積分平方前的信噪比SNRcoh為:
![]()
平方損耗LSQ就可以表示為LSQ=SNRcoh-SNRSQ。系統采用非相干解調時,總的誤碼率可表示為:![]() 為信噪比。
為信噪比。
3.2 仿真結果與性能分析
仿真中的數據信號采用6級gold序列,環境噪聲是方差為1的加性高斯白噪聲。各種信號跟蹤環路均存在用信噪比或者誤碼率來衡量跟蹤靈敏度門限值,而觀察信噪比的大小判斷接收機是否正在良好地跟蹤真實衛星信號的一個重要準則。
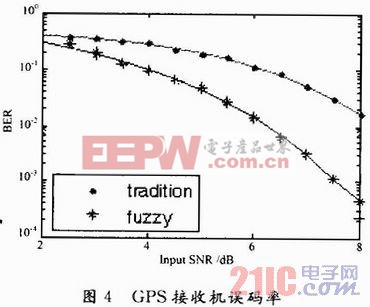
圖4給出了兩種GPS接收機對接收信號進行解擴解調后數據信號的誤碼率曲線特性,可以看出采用了模糊控制環路的接收機誤碼率性能更優。較低的誤碼率保證了接收機定位信息的準確度。












評論