基于信號幅度衰減測距的水下定位方法

電信號與聲波信號關系的具體公式如下:
發(fā)送端電信號轉換為聲信號公式為:
接收端聲信號轉換為電信號公式為:
Mu=Ur/Pr (5)
可以將距離表示為關于頻率和幅度衰減的函數(shù),下面進行具體的運算,式(4)和式(5)代表頻率分別為f1,f2的兩個信號經(jīng)過圖1所示流程:
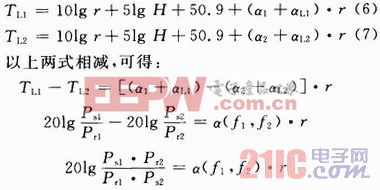
其中:將[(α1+αL1)-(α2+αL2)]記為α(f1,f2),在最大反轉距離H,水溫t,海況級數(shù)n確定以后,α(f1,f2)就是關于f1,f2的函數(shù);然后再將發(fā)送接收端電聲轉換公式代入,可以得到:
2 方法的分析和實驗設計
2.1 信號轉換、傳輸和處理的流程
下面從信號處理的角度來分析本文方法的具體實現(xiàn)。本文所用的柱狀換能器共有4個頻帶,每個頻帶有16個頻點,頻率由低到高依次代表了0000到1111共16個二進制數(shù),換能器一次發(fā)送4個4位二進制數(shù),共16位。信號轉換、傳輸和處理的流程如圖2所示。本文引用地址:http://www.104case.com/article/160292.htm

整個過程信號傳輸和變換的流程如下:
分別來自這4個頻帶的4個代表了二進制數(shù)的信號疊加后由換能器發(fā)送,發(fā)送端換能器將電信號轉換為聲信號,接收端換能器再將經(jīng)過衰減的聲信號轉換回電信號,這時電信號經(jīng)過前置低通濾波器、A/D轉換、加窗處理變換為可以由數(shù)字濾波器或計算機處理的有限長離散序列,此時可得出信號的頻譜。這時在頻譜中可以得出信號幅度的極值點,而極值點對應的頻點就代表了傳送的二進制數(shù)據(jù)。現(xiàn)在利用幅度的衰減來進行定位,所以對傳送的具體的二進制數(shù)據(jù)可不必詳細追究,主要關注信號的頻率和接收端信號的幅度。
2.2 實驗設計
本節(jié)設計了一個基于換能器的海上試驗,檢驗利用上述方法得到的節(jié)點之間的距離與實際距離是否相同或接近。
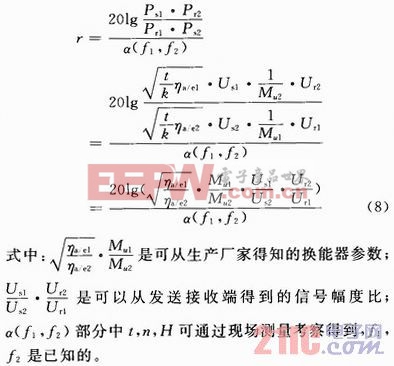
首先按設定的距離(記為R)布置好換能器,然后根據(jù)深海淺海、遠近距離找到與此對應的公式,例如淺海遠距離:

式中:![]() 部分為換能器本身的參數(shù),可從生產(chǎn)廠家得知
部分為換能器本身的參數(shù),可從生產(chǎn)廠家得知![]() 部分為信號幅度比,可以從發(fā)送接收端得到;α(f1,f2)部分中f1,f2是已知的,而t,n,H可通過現(xiàn)場測量考察得到。利用該公式求得一個距離r,和實際距離R比較,以檢驗本文方法是否準確。
部分為信號幅度比,可以從發(fā)送接收端得到;α(f1,f2)部分中f1,f2是已知的,而t,n,H可通過現(xiàn)場測量考察得到。利用該公式求得一個距離r,和實際距離R比較,以檢驗本文方法是否準確。
3 結語
水下定位是水下無線傳感器網(wǎng)絡研究的一個熱點問題,針對水下的情況,通過研究水下聲波傳輸過程特點進而推出節(jié)點之間的距離來進行定位。基于信號幅度衰減測距的水下定位方法不僅能夠滿足無線傳感器網(wǎng)絡節(jié)點定位的要求,而且其成本較低,易理解及操作,精度高,可用于實際應用中。
隨著技術發(fā)展,水下節(jié)點的能量問題可能會因電池能夠長久供電而變成次要問題,由此引起了相應的網(wǎng)絡連通性、定位、路由等問題的重新分析與設計,新目標的引入必將推動該領域新的發(fā)展。

萬能遙控器相關文章:萬能遙控器代碼
pid控制相關文章:pid控制原理





評論