單相逆變器多環反饋控制策略研究

本文引用地址:http://www.104case.com/article/160279.htm
2 控制器模型的特性分析
在圖2控制框圖中,電壓環作為逆饋瞬時控制外環,電流環作為逆饋瞬時控制內環。逆變器輸出電壓經過比例環節與參考電壓比較,誤差經過PI調節后作為電流控制內環的一部分基準,另一部分基準來自于參考電壓的順饋,這個復合基準與來自比例環節的電容電流比較后,再經過比例調節和放大環節就得到了逆變器開關管的輸出電壓。為了能夠更清楚地分析上面的控制原理,現在采用下面的工程化分析方法,即
1)由于電壓和電流逆饋環節的濾波常數很小,將其忽略;
2)濾波電感和濾波電容的等效串聯阻抗對電路性能的影響較小,也將其忽略;
3)以線性電阻為負載對象分析。
取PI調節函數為![]() 可以對Uref實現誤差為零的復現(證明略)。利用上面的分析,可以把圖2化簡為圖3。
可以對Uref實現誤差為零的復現(證明略)。利用上面的分析,可以把圖2化簡為圖3。
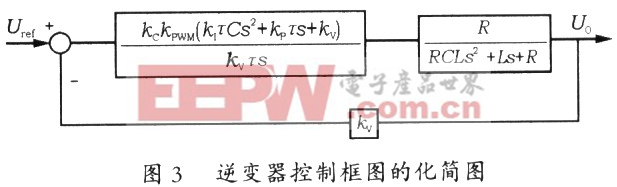
這樣,得到逆變器的開環傳遞函數為:
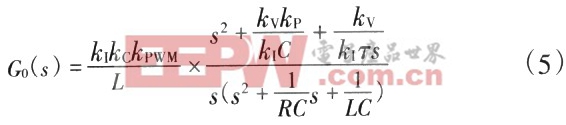
其極點和零點為
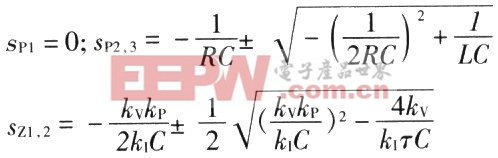
通常 則式(5)可以化簡為
則式(5)可以化簡為
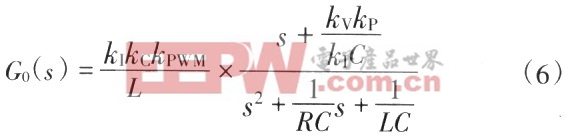
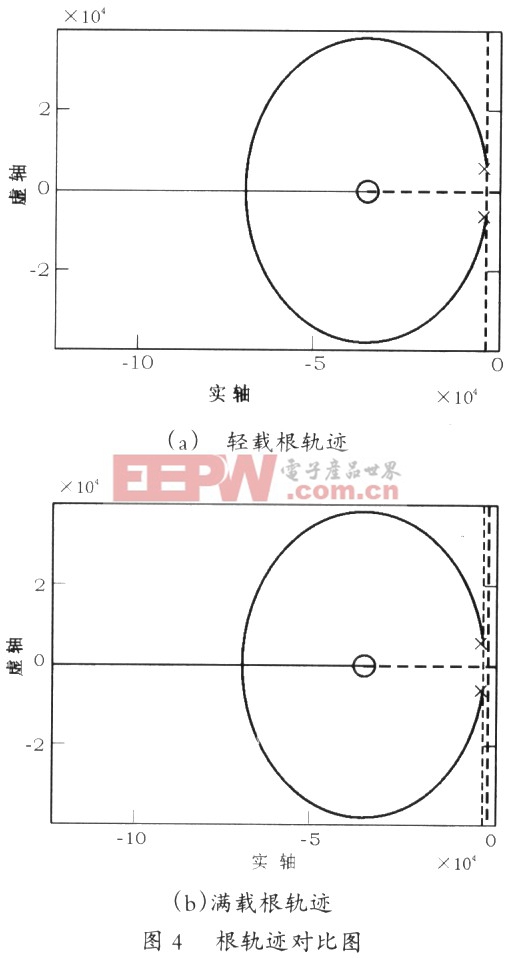
根據上面的函數表達式,作出的閉環根軌跡如圖4所示。圖4中虛線部分是電壓瞬時值反饋控制的根軌跡,實線是本文所采用的復合控制的根軌跡圖。圖4(a)和圖4(b)分別是輕載和滿載的軌跡圖。從圖4中可以看出,本文所采用的控制方案由于在開環傳遞函數中引入的附加零點,使閉環系統的根軌跡遠離虛軸,大大增加了系統的穩定性。而且![]() !萼筍的值比較大,因此可以減少系統的調節時間,又不會造成系統較大的超調。
!萼筍的值比較大,因此可以減少系統的調節時間,又不會造成系統較大的超調。
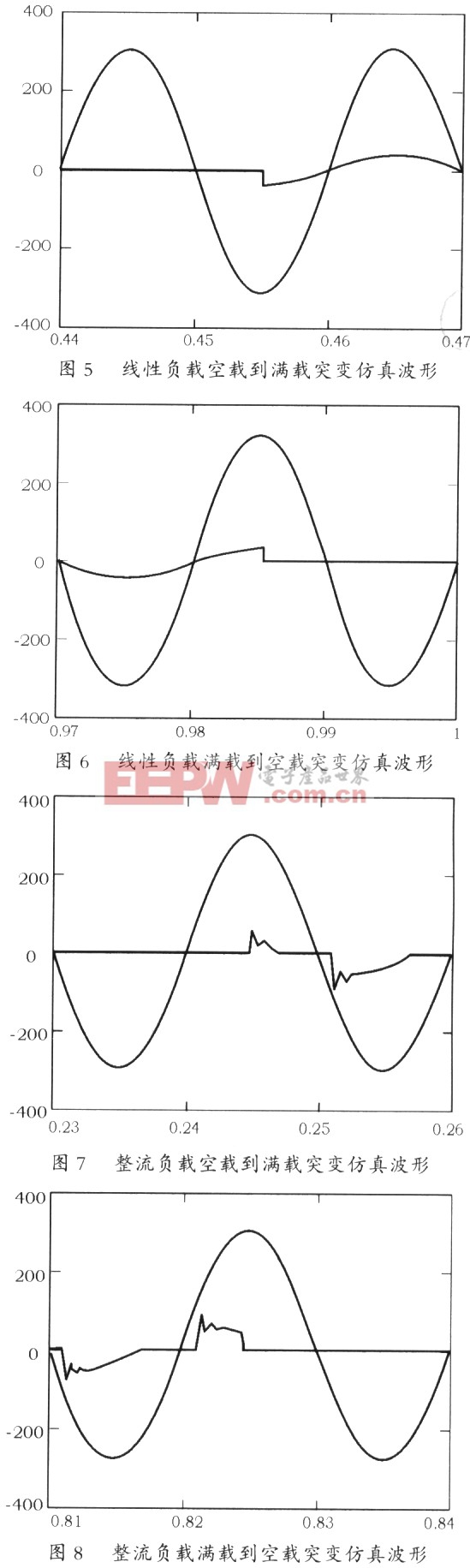
3 仿真與實驗
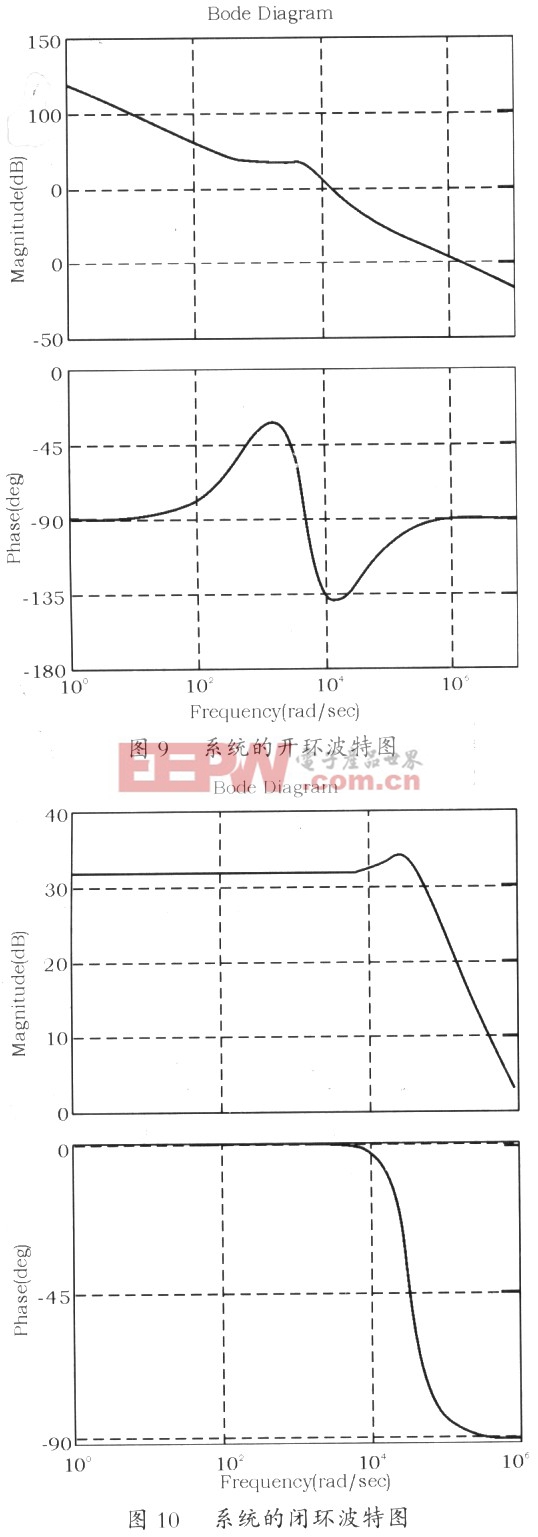
圖5~圖8是用逆變器驗證上面的控制方案的仿真結果。圖中的切換都是選在正弦波的波峰處,這種情況代表了切換的最大電壓崎變。圖中所示波形的動態調整時間小于0.5ms,穩態整流橋負載THD為1%。圖9和圖10是系統的開環和閉系統的相位裕度大于60℃,為數字控制的滯后,死區效應,濾波器的滯后特性等留有足夠的穩定裕量。而且調節時間很快,通帶內增益穩定,且相移很小。






評論