采用TMS320F2812DSP的交流永磁同步直線電機(jī)控制系統(tǒng)的設(shè)計

4.永磁同步直線電機(jī)控制系統(tǒng)設(shè)計
根據(jù)直線電機(jī)工作原理,采用矢量變換設(shè)計其控制驅(qū)動系統(tǒng)。
控制器采用DSP處理器,選用TI公司的TMS320F2812 DSP。它是TI公司最新推出的32位定點(diǎn)高速數(shù)字信號處理器,150MIPS的執(zhí)行速度使得指令周期縮短至6.67ns,內(nèi)置12位的AD轉(zhuǎn)換器,最小轉(zhuǎn)換時間為80ns[4]。功率驅(qū)動部分采用IPM模塊, PWM頻率最高可達(dá)20K。
永磁同步直線電機(jī)驅(qū)動控制系統(tǒng)結(jié)構(gòu)框圖如圖3所示
5.軟件結(jié)構(gòu)
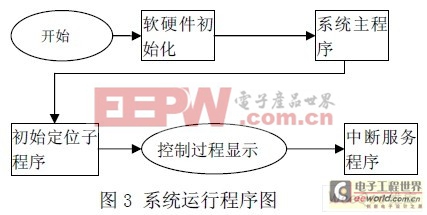
系統(tǒng)軟件包括軟硬件初始化程序、主程序、初始定位子程序、控制過程顯示程序和中斷服務(wù)子程序5個部分。系統(tǒng)復(fù)位后首先執(zhí)行初始化程序,實(shí)現(xiàn)對DSP內(nèi)部各功能模塊工作模式的設(shè)定和初始狀態(tài)的檢測;然后執(zhí)行主程序,開啟定時中斷、外部保護(hù)中斷及初始定位子程序;獲得動子準(zhǔn)確位置信息后,進(jìn)入運(yùn)行狀態(tài),執(zhí)行中斷服務(wù)子程序[5]。 系統(tǒng)的主要功能,包括電流大小的計算、速度位置信息和矢量變換,由中斷服務(wù)子程序來完成。根據(jù)系統(tǒng)運(yùn)行原理設(shè)計其軟件結(jié)構(gòu)。圖5為系統(tǒng)運(yùn)行程序圖:
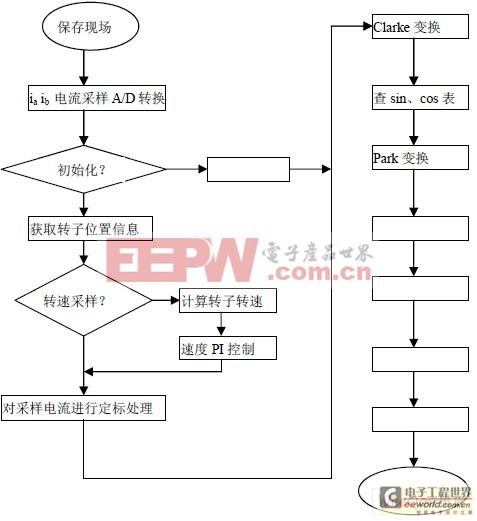
系統(tǒng)中斷子程序圖如圖4所示:









評論