多路溫度采集及監(jiān)控系統(tǒng)的設計與實現

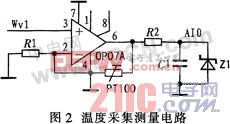
溫度采集測量部分采用高精度、重復性好、應用廣泛的PT100作為采樣電阻;信號放大部分采用低功耗、低輸入失調電壓、線性好的OP07A;A/D模塊采用8051F350內部的高速率24位A/D轉換器。溫度采集測量電路如圖2所示,圖中PT100是高精度溫度傳感器,Z1是3.6 V穩(wěn)壓管,起保護作用。
3.3 串行通信電路
串行通信采用壓差傳輸的CAN總線,它具有傳輸距離遠、抑止共模干擾能力強等優(yōu)點,通信速率可達1 Mb/s。CAN總線通信接口集成了CAN協(xié)議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環(huán)冗余檢驗、優(yōu)先級判別等。數據段長度最多為8個字節(jié),可滿足通常工業(yè)領域中控制命令、工作狀態(tài)及測試數據的一般要求。同時,8個字節(jié)不會占用總線時間過長,從而保證了通信的實時性。CAN協(xié)議采用CRC檢驗并可提供相應的錯誤處理功能,保證了數據通信的可靠性。在整個溫度測控系統(tǒng)中,采用CAN總線作為數據通信線路,測溫模塊安裝在距離測量點較近地范圍內,這樣,來自傳感器的接線就比較短,從而減少了干擾。
3.4 功率控制模塊
P10~P15輸出6路PWM波,通過光電隔離和RC濾波電路控制可控硅模塊的輸入控制電壓,改變可控硅模塊的導通角,從而改變輸出功率。功率控制模塊電路如圖3所示,其中P10,P10分別是一路PMW,通過改變它們的高低電平比例來改變控制電壓K0和K1,從而控制加熱器的功率。
4 系統(tǒng)軟件設計
整個系統(tǒng)的軟件設計包括兩部分:計算機軟件(上位機)和單片機軟件。其中,計算機軟件主要完成設定溫度、監(jiān)控系統(tǒng)當前溫度和標定系統(tǒng)。單片機軟件完成A/D采集、串口通信和功率模塊控制。
上位機軟件采用LabWindows/CVI編寫,它將功能強大、使用靈活的C語言平臺和用于數據采集分析和顯示的測控專業(yè)工具有機地結合起來,利用它的集成化開發(fā)環(huán)境、交互式編程方法、函數面板和豐富的庫函數大大增強了C語言的功能,為建立測試系統(tǒng)、自動測試環(huán)境、數據采集系統(tǒng)、過程監(jiān)控系統(tǒng)等應用軟件提供了一個理想的軟件開發(fā)環(huán)境。可以脫離Labwindows/CVI開發(fā)環(huán)境運行,用戶最終看見的是和實際儀器面板相類似的操作面板。板卡與PC機通過RS-232串口線連接。
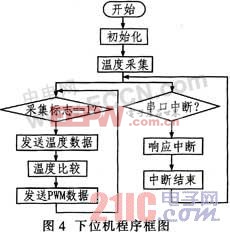
下位機程序框圖如圖4所示。系統(tǒng)上電后,下位機程序可使單片機不停地采集溫度,當上位機向下位機發(fā)出命令置位采集標志位時,下位機采集的溫度送到上位機的面板并顯示,再將所采集的溫度數據同預先所設定的溫度值相比較,當采集的溫度小于設定溫度時,根據采集的溫度值跟設定溫度差值的大小,單片機的P10~P15引腳輸 出6路PWM,通過光電隔離TLP521-2和RC濾波電路控制可控硅模塊的輸入控制電壓,改變可控硅模塊的導通角,從而改變輸出功率。隨著采集到的溫度值越來越接近設定溫度值,單片機輸出的PWM值越來越大,導通角越來越小,輸出的功率也相應變小,直到采集的溫度等于設定溫度時,導通角完全關斷。同時下位機也可隨時響應串口中斷,便于用戶通過上位機設置或修改設定溫度和控制范圍。
5 結束語
本系統(tǒng)設計采用高精度溫度傳感器和低輸入失調電壓、線性好的運算放大器組成信號調理電路,同時采用24位的A/D采集模塊,可使系統(tǒng)測量精度達0.02℃,控制精度達0.5℃,滿足用戶對溫度控制的要求。采用功能強大的8051F350單片機作為控制核心,減少了系統(tǒng)對外圍器件的需求,簡化了電路設計,提高了可靠性,同時也降低了成本。









評論