一種通信電源監控系統組網方案的設計

3.2 下位機與智能設備之間的通信
下位機與智能設備之間采用RS485主從式通信。RS485采用平衡發送和差分接收的方式來實現通信,具有很強的抗共模干擾能力,傳輸距離在10Kbps傳輸速率下可達1.2公里。其具體實現方案如圖2所示。
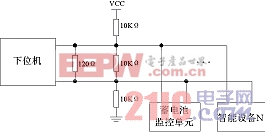
圖2 RS485通信的整體實現方案
在采用這種通信方案時應注意以下幾點:
(1) 在總線末端應接一個匹配電阻,吸收總線上的反射信號,消除信號傳輸中的毛刺,保證信號純度;
(2) 當總線上無信號傳輸時,處于懸浮狀態,易受到干擾。因此應在差分信號的正、反端之間,正端與電源之間,反端與地之間各串接一個10K電阻,這樣一來,當總線上無信號傳輸時,正端電平約為3.3V,負端電平約為1.7V,此時即使有干擾信號,也很難產生串行通信的起始信號“0”;
(3) 由于RS485是一種半雙工的通信方式,發送和接收共用一條通道,本系統采用MAX485對其進行擴展,接收、轉換功能由和DE控制,因此必須采用處理器的一根口線控制其工作方式。由于單片機復位時,各端
口均為高電平,因此在連接時必須注意將該口線與DE相連,其反向信號與相連,以保證系統復位時,主從機都處于接收狀態。
4 通信模塊軟件設計
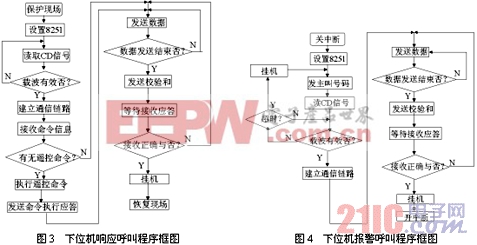
4.1 上位機與下位機通信流程
上位機與下位機之間的通信包括上位機主動呼叫、下位機響應呼叫和下位機報警呼叫、上位機響應呼叫兩種情況,其軟件流程分別如圖3、圖4所示(只給出了下位機部分的程序流程)。
4.2 下位機與智能設備通信流程
由于RS485是半雙工的通信方式,發送和接收均由同一器件和同一通道完成,因此控制信號高低電平的轉換十分關鍵。本系統將單片機的發送中斷標志TI和接收中斷標志RI作為切換的參考,但此時必須注意應保證控制端 、DE的信號有效脈寬大于發送或接收一幀信號的長度。其具體的軟件流程如圖5所示。
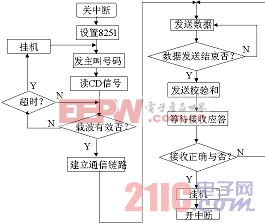
圖5 本地通信程序框圖









評論