基于CC1100的無線視頻監控系統設計

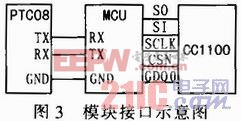
對本系統來說,PTC08串口攝像頭模塊與微控制器采用串口通信方式。微控制器通過其RX端向PTC08發送拍照的一系列指令,攝像頭模塊采集完數據,收到發送數據指令后,會通過其TX端口將圖像數據送至微控制器。CC1100-232收到數據時,會自動將數據從串口送至接收端處理器。微控制器、PTC08和CC1100模塊間的接口示意圖如圖3所示。本文引用地址:http://www.104case.com/article/160011.htm
3 系統軟件設計
系統采用單片機、無線收發模塊及串口攝像頭模塊來實現,下位機軟件采用匯編語言編寫,上位機軟件編程采用VC++語言。在實際操作過程中,可通過上位機程序將預先定義好的指令發送到采集端處理器,控制采集模塊動作,獲取圖片數據;采集端處理器會利用無線收發模塊將數據傳至接收端處理器,進而在上位機上恢復出JPEG圖片。
3.1 PTC08模塊初始化配置
PTC08模塊上電之后,延時2.5 s,微控制器向其發送一系列控制指令,包括復位、設置圖片大小、壓縮率、拍照、讀取數據,停止拍照等。根據模塊與微控制器的通信協議,微控制器將PTC08模塊復位的匯編語言部分代碼如下(前提是上位機已將復位指令數據56 00 26 00分別存入微控制器RAM的70H至73H單元中):

PTC08模塊在收到此復位指令后,會向微控制器發出7600 26 00,表示模塊復位成功。模塊其他指令數據可在其數據手冊中查詢。
3.2 上位機軟件設計
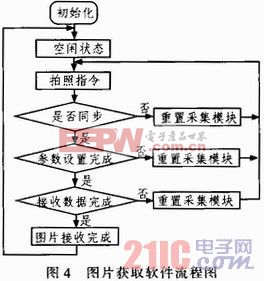
圖4為獲取圖片的上位機軟件流程圖,其狀態及函數描述如下。







評論