超聲波測距報警系統的設計

系統利用單片機的定時器功能產生40KHz 脈沖信號, 并通過端口RB1 輸出到超聲波發射部分。超聲波發射電路中, 六反相緩沖器CD4049 包括6個非門,現僅使用3 個,為防止干擾或被靜電擊穿導致整個CD4049 損壞,把未使用的3 個非門串起來做接地處理。當控制端輸出一系列固定頻率脈沖時,在超聲波發射器TCT40-1F 上就以固定的頻率加正電壓和反電壓,從而發出大功率的超聲波。這種以軟件方式產生的波形較用其他方式產生的效果更理想。
接收器采用與發射器相配對的TCT40-2S, 將超聲波調制脈沖轉換為40KHz 毫伏級電壓信號, 此信號需經過放大處理才能觸發單片機中斷。芯片CX20106 內置前置放大器、限幅放大器、帶通濾波器、檢波器、積分器、整型電路等。其中前置放大器具有自動增益控制功能,可保證在超聲波傳感器接收較遠反射信號而輸出微弱電壓時,放大器有較高的增益,而在近距離輸入信號強時,放大器不會過載。調節芯片引腳5 的外接電阻R3 的值,可設置濾波器的中心頻率。當RB3=200K時,中心頻率為42KHz;當RB3=220K 時,中心頻率為38KHz。當接收到與濾波器中心頻率相符的信號時,引腳7 輸出一個低電平,從而觸發中斷。適當改變引腳2 的外接電容C4 的值,可改變接收電路的靈敏度和抗干擾能力。
3位LED數碼顯示采用顯示器動靜態驅動相結合的方法實現。采用單片機串行口通過74HC164 串入并出移位寄存器來輸出LED 的段驅動信號,每個LED 的段信號都連在一起,并與74HC164 輸出的段驅動信號連接。每個LED 的位驅動信號由單片機的端口RB5~RB7 通過ULN2004 驅動集成塊分別驅動,LED 需用共陰數碼管。
報警模塊的功能是, 當傳感器與障礙物的距離不小于設定值時,綠色指示燈閃亮;反之,紅色指示燈閃亮,蜂鳴器發聲,提示人員注意安全距離。
2.2 軟件設計
軟件分為兩部分:主程序和中斷服務程序,流程圖如圖2 所示。主程序完成初始化工作及超聲波發射和接收控制。中斷服務程序包括定時中斷服務子程序和外部中斷服務子程序,分別完成超聲波的發射、距離計算及顯示報警等工作。
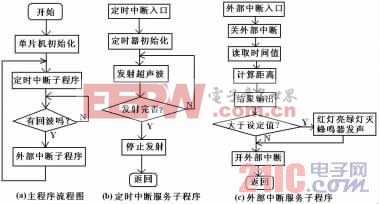
3.測試結果
當距離大于2m 時,綠燈閃亮,顯示距離;當距離小于1m 時,紅燈閃亮,由端口RB2 驅動蜂鳴器報警,顯示距離;當距離介于2m 和1m之間時,紅燈閃亮,顯示距離。為提高抗干擾能力,系統連續發射超聲波,測量三次,從中剔除最大最小值,取中間值計算出距離。
4.結語
此系統較好地實現了測距及報警功能,可用于汽車倒車、液位監控等場合,而且測量簡單、經濟、可靠。








評論