電力系統(tǒng)混沌振蕩的自適應(yīng)最優(yōu)控制策略

3 電力系統(tǒng)混沌振蕩的自適應(yīng)最優(yōu)控制
3.1 非線性最優(yōu)控制器設(shè)計(jì)
假設(shè)系統(tǒng)為精確建模,系統(tǒng)的等值阻尼系數(shù)D,發(fā)電機(jī)的機(jī)械功率Pm以及擾動(dòng)功率幅值Pe已知,也就是說(shuō)γ、ρ和F已知。受控的閉環(huán)系統(tǒng)如下式所示。

對(duì)該系統(tǒng)采用二次型最優(yōu)控制方法,使
式中,Q、R分別對(duì)應(yīng)于狀態(tài)量的權(quán)矩陣和控制量的權(quán)系數(shù)。
如果系統(tǒng)為精確建模,且干擾的周期性負(fù)荷的幅值已知,由控制器(6)與原系統(tǒng)的構(gòu)成的閉環(huán)系統(tǒng)可知,控制器將補(bǔ)償系統(tǒng)的非線性和外部干擾,并增加了系統(tǒng)的阻尼,因而將抑制混沌,保證系統(tǒng)的漸近穩(wěn)定。
3.2 自適應(yīng)最優(yōu)控制器設(shè)計(jì)
由于系統(tǒng)的不精確建模,假設(shè)系統(tǒng)中等值阻尼系數(shù)D、發(fā)電機(jī)機(jī)械功率Pm、擾動(dòng)功率幅值Pe等一些參數(shù)不確定,即γ、ρ和F不確定,則最優(yōu)控制器中γ、ρ和F這些參數(shù)由

式中K3,K4,K5均為大于零的自適應(yīng)控制系數(shù)。
為證明閉環(huán)系統(tǒng)在控制器(7)作用下能保持漸近穩(wěn)定,構(gòu)造如下的Lyapunov函數(shù):

于是,閉環(huán)系統(tǒng)(3)在控制器(7)作用下可以保持漸近穩(wěn)定,即當(dāng)電力系統(tǒng)受擾進(jìn)入混沌狀態(tài)甚至失去穩(wěn)定時(shí),其也能在控制器作用下回到初始平衡點(diǎn)。
4 數(shù)值仿真分析
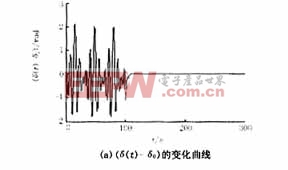
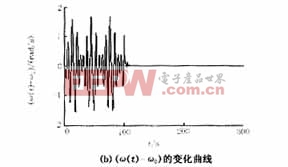
式(1)中的參數(shù)分別取為:H=100,Ps=100,D=2,Pm=20,β=1,即a=1,γ=0.02,ρ=0.2。由文獻(xiàn)[8]知,當(dāng)Pe=25.93(F=Pe/H=0.2593),系統(tǒng)處于混沌狀態(tài),如圖2(a)(b)的前100s所示;當(dāng)Pe=25.94(F=0.2594)時(shí),系統(tǒng)不僅處于混沌狀態(tài),而且在t=137s時(shí)已經(jīng)失去穩(wěn)定,如圖3(a)、(b)的137s所示。 本文引用地址:http://www.104case.com/article/159952.htm



評(píng)論