基于全局貪心的有向傳感器網絡覆蓋算法

2 實驗及分析
下面通過模擬實驗評估本文算法的性能,所有實驗都用Matalb 7.4.0實現。實驗中設定監測區域大小為邊長500 m的正方形,不同數目的有向傳感器節點隨機部署在監測區域中,傳感器的覆蓋角度為α=90°,傳感器可選方向數為P=4,傳感半徑Rs=60 m。比較了本文算法、DGreedy算法及傳感器隨機選擇工作方向的隨機算法Random算法的性能。本文引用地址:http://www.104case.com/article/159858.htm
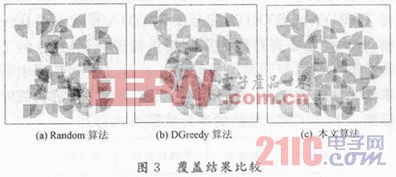
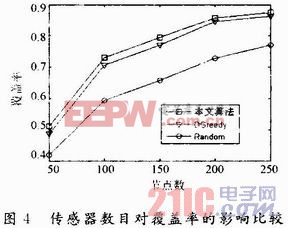
當節點個數N=50時,3種算法的覆蓋效果如圖3所示,圖中的圓形表示每個節點的可能覆蓋范圍,灰色扇形表示每個節點的實際覆蓋區域,顏色越深,表示覆蓋重疊數越多。很顯然,Random算法的覆蓋結果中重疊覆蓋區域最多,因此覆蓋率最低,本文算法覆蓋率最高。不同傳感器節點數目時,3種算法的覆蓋率如圖4所示。由于本文算法每次都取一重覆蓋區域面積最大的傳感器節點及其傳感方向,使得整個網絡的一重覆蓋率較高,多重覆蓋率較低;DGreedy算法以剩余能量為優先級,選取一重覆蓋區域面積最大的方向,但優先級最高的節點所選方向不一定是所有節點中一重覆蓋區域面積最大的方向,因此覆蓋率較本文算法有所降低;Random算法節點的覆蓋方向隨機產生,重疊覆蓋區域最多,因此覆蓋率最低。
3 結語
有向傳感器由于傳感范圍有限,其覆蓋問題比基于全向感知模型的傳感器覆蓋更復雜。有向傳感器的覆蓋問題,就是按某種原則選擇每個傳感器的工作方向,以減少重疊覆蓋區域,增加一重覆蓋區域。本文以傳感器最大一重覆蓋區域面積作為優先級,以全局貪心原則確定傳感器的工作方向,旨在調度傳感器的工作方向以覆蓋盡可能大的區域。通過仿真實驗,與DGreedy算法和Random算法進行比較,驗證了本文有向傳感器網絡覆蓋增強算法的有效性。












評論