一種并網(wǎng)逆變器功率跟蹤控制策略研究

3 自抗擾控制器的設(shè)計及參數(shù)整定
3.1 自抗擾控制器原理
ADRC由跟蹤微分器(TD)、擴張狀態(tài)觀測器(ESO)和非線性狀態(tài)誤差反饋控制律(NLSEF)3部分組成。以二階被控對象為例,圖3為ADRC結(jié)構(gòu)圖。其中Z為系統(tǒng)給定,Z11為安排的過渡過程,Z12為Z11微分,Z21,Z22,Z23為估計量,u為控制量,y為系統(tǒng)實際輸出,μ為所有擾動的綜合。本文引用地址:http://www.104case.com/article/159808.htm
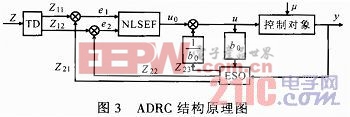
TD用來安排過渡過程,快速無超調(diào)地跟蹤輸入信號,并具有較好的微分特性,從而避免了設(shè)定值突變時,控制量的劇烈變化及輸出量的超調(diào),很大程度上解決了系統(tǒng)響應(yīng)快速性與超調(diào)性之間的矛盾。也正因為如此,使得ADRC在快速性要求較高的場合受到一定限制。
ESO是ADRC的核心部分,可以將來自系統(tǒng)內(nèi)部或外部的各種因素都歸結(jié)為對系統(tǒng)的擾動。通過ESO估計出系統(tǒng)各個狀態(tài)變量,同時估計出系統(tǒng)的內(nèi)外擾動并給予相應(yīng)補償,從而實現(xiàn)系統(tǒng)的動態(tài)反饋線性化。TD輸出與ESO估計值取誤差得到系統(tǒng)狀態(tài)變量誤差。誤差量送入NLSEF運算后與來自ESO的補償量求和,最終得到被控對象的控制量。
由于ADRC是根據(jù)系統(tǒng)的時間尺度來劃分對象的,所以在控制器設(shè)計時不用考慮系統(tǒng)的線性或非線性、時變或時不變,從而簡化了控制器設(shè)計。
3.2 自抗擾控制器參數(shù)整定
一階ADRC方程為: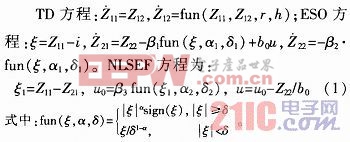
TD方程,ESO方程及式(1)中非線性函數(shù)fun用來安排過渡過程,其中r為速度因子,r越大,跟蹤速度越快,h為步長。
ADRC控制性能主要取決于參數(shù)的合理選取,而參數(shù)的調(diào)整主要依靠設(shè)計者的工程經(jīng)驗,并利用仿真反復(fù)試選確定。對ADRC參數(shù)調(diào)整方法一般可分為兩步,首先把TD/ESO/NLSEF看作彼此獨立的3部分。整定TD和ESO的參數(shù),待這兩部分調(diào)整得到滿意的效果后結(jié)合NLSEF對ADRC進行整體參數(shù)整定。將自抗擾控制技術(shù)引入基于電流跟蹤的SVPWM光伏逆變器中,采用ADRC進行電流跟蹤控制,用ESO對包括負載在內(nèi)的未知擾動進行觀測。通過ESO對負載變化及時、準確地估計和補償,能有效抑制各種擾動帶來的影響。
4 基于ADRC的并網(wǎng)逆變器控制系統(tǒng)
并網(wǎng)逆變器的控制目標是實現(xiàn)正弦電流輸出和相位控制,使逆變器工作在單位功率因數(shù)并網(wǎng)模式或無功補償模式。常見的電流控制方法有PID控制,但其對正弦參考量難以消除穩(wěn)態(tài)誤差。為了解決該問題,采用ADRC實現(xiàn)了正弦電流控制的零穩(wěn)態(tài)誤差,并在快速性與穩(wěn)定性上優(yōu)于常規(guī)PID控制器性能。
基于ADRC的光伏逆變器電流跟蹤控制結(jié)構(gòu)如圖4所示。由于開關(guān)頻率(10 kHz)遠高于電網(wǎng)頻率,因此為了便于分析,忽略開關(guān)動作對系統(tǒng)的影響,將SVPWM逆變單元近似為一慣性環(huán)節(jié)。濾波環(huán)節(jié)中,R為電感L的串聯(lián)等效電阻,ug為電網(wǎng)電壓,i*為與電網(wǎng)電壓同頻同相的并網(wǎng)電流參考信號。反饋信號從逆變器的輸出接入,經(jīng)ADRC進行參數(shù)調(diào)整,得到與參考指令相比較的信號,進而送入逆變器進行控制。

基于ADRC的光伏逆變器電流跟蹤控制數(shù)學(xué)模型如圖5所示,其輸出電流的傳遞函數(shù)I=AI*-A(ugrid+其他擾動μ),其中A=Gpi(s)Ginv(s)/[sL+R+Gpi(s)Ginv(s)],Gpi(s)=(Kps+Ki)/s,Ginv(s)=KPWM/(TPWMs+1)。可見,逆變器的輸出電流與參考電流、電網(wǎng)電壓有關(guān),采用ADRC閉環(huán)控制,能夠抑制來自包括電網(wǎng)及其他方面的擾動。





評論