十字路口智能交通燈控制系統的FPGA實現

2 傳統交通控制系統狀態分析
當前大部分十字路口的交通控制系統模式,都是根據道路交通狀況,事先設定好的紅、綠、黃色信號燈時間,來控制整個交通岔路口的車輛通行。目前最普遍的交通控制系統信號燈變化的基本模式如圖3所示。
根據此模式下信號燈相位的基本要求,設定直行方向綠色信號燈時間為24 s,左轉、右轉方向綠色信號燈時間為6 s,黃色信號燈時間統一為3 s。其自動運行狀態如表1所示。本文引用地址:http://www.104case.com/article/159773.htm
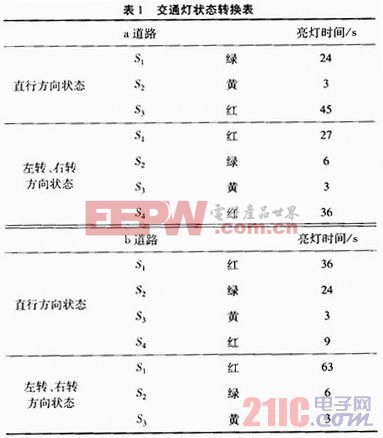
從狀態轉換表可以看出,以a道路直行方向信號燈狀態S1為出發點,3種顏色信號燈不斷循環,顯示時間為S1+S2+S3=72 s,即為交通控制系統的一個周期時間。通過計算,可得a道路直行方向綠燈時間概率為24/72=33.33%,左轉、右轉方向綠燈時間概率為6/72=8.33%,b道路狀態與a道路相同。無論十字路口車流量狀況如何,傳統模式下的各個路口和方向的車輛通行概率保持不變。
3 智能交通控制系統仿真
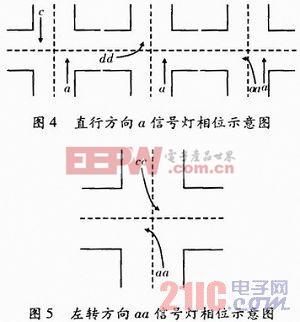
智能交通控制系統相對于傳統的交通控制系統,最大的創新點在于,實現了車輛通行相對方向不同步的信號控制,它會根據車流量的變化及時調整交通信號控制策略,最大限度提高了十字路口車流量的通行效率。整個控制電路包括了兩個控制模塊:直行方向控制模塊與左轉方向控制模塊,右轉方向和行人通行時間由直行方向控制模塊概括。控制程序運行時,兩個模塊交替運行,進行循環控制。直行4個方向與左
轉4個方向的信號相位分別一致。例如,a方向具體相位如圖4所示。aa方向具體相位如圖5所示。
控制電路以1 Hz時鐘脈沖作為系統時鐘,它包含了8路輸入信號和48路輸出信號,具體信號分布如表2所示。












評論