大功率永磁低速同步電機(jī)的無傳感器控制

摘要:為了滿足大功率永磁同步電機(jī)(PMSM)在低速運轉(zhuǎn)時實現(xiàn)無傳感器控制的需要,研究了一種新型的滑模觀測器(SMO)方法。采用SMO對d,q坐標(biāo)系下的感應(yīng)電動勢進(jìn)行估算,并結(jié)合鎖相環(huán)(PLL)原理得到轉(zhuǎn)子位置和速度,同時基于Lyapunov函數(shù)分析了SMO參數(shù)的收斂性,并對滑模增益的選擇進(jìn)行了分析,該方法解決了傳統(tǒng)SMO算法在極低速下無法實現(xiàn)的問題。實驗結(jié)果表明,該方法能準(zhǔn)確計算出電機(jī)的轉(zhuǎn)子位置和速度,使系統(tǒng)具有良好的穩(wěn)態(tài)精度和動態(tài)性能。
關(guān)鍵詞:永磁同步電機(jī);滑模觀測器;無傳感器控制
1 引言
由于傳統(tǒng)機(jī)械傳感器自身存在缺點及局限性,所以無傳感器技術(shù)已成為調(diào)速控制系統(tǒng)的重要研究方向之一。特別是在極低速或靜止運行情況下的無傳感器控制技術(shù),仍是高性能電機(jī)控制的研究難點。SMO由于具有魯棒性強(qiáng)、動態(tài)響應(yīng)快、設(shè)計簡單等優(yōu)點,得到了廣泛應(yīng)用。但傳統(tǒng)的SMO算法大都是應(yīng)用于觀測靜止坐標(biāo)系下的反電動勢,在低速運行過程中難以穩(wěn)定運行。
在此直接使用d,q坐標(biāo)系下的電壓/電流方程,用SMO來觀測電機(jī)的感應(yīng)電動勢,同時結(jié)合PLL的優(yōu)良特性;實時跟蹤、估算實際的轉(zhuǎn)子信息,即使電壓相角不平衡、諧波較大等條件下,也具有較好跟蹤性能。該方法不僅保留了傳統(tǒng)SMO算法的優(yōu)點,同時也克服其缺點。該算法簡單、易于工程實現(xiàn),實驗結(jié)果進(jìn)一步證實了其可行性。
2 PMSM無傳感器控制
在對PMSM進(jìn)行建模時,通常先假設(shè):轉(zhuǎn)子永磁磁場在氣隙空間分布為正弦波,定子電樞繞組中的感應(yīng)電動勢也為正弦波;忽略定子鐵心飽和,認(rèn)為磁路為線性,電感參數(shù)不變;不計鐵心渦流與磁滯損耗;轉(zhuǎn)子上無阻尼繞組。基于以上假設(shè),對凸極式PMSM建立d,q坐標(biāo)系下的數(shù)學(xué)模型為:
![]()
式中:下標(biāo)d,q分別表示d,q軸分量;ωe為轉(zhuǎn)子電角速度;R為定子電阻;Ed,Eq為d,q坐標(biāo)系下的電動勢,Ed=0,Eq=ωeψf,ψf為永磁體磁鏈。
2.1 滑模觀測器設(shè)計
根據(jù)式(1),構(gòu)造SMO方程如下:

式中:k為正常數(shù),決定了SMO的開關(guān)增益。
實際應(yīng)用中可采用飽和函數(shù)sat()取代常規(guī)SMO中的符號函數(shù)sgn(),可有效防止控制器發(fā)生抖振,其表達(dá)式為: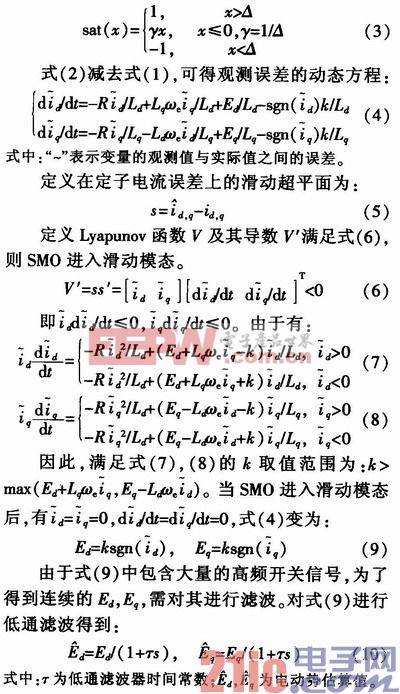














評論