基于Zigbee無線傳感器網絡的智能燈光跟隨系統

3 系統的軟件設計
3.1 無線傳感器網絡的設計
系統中Zigbee節點的軟件設計移植了Z-stack協議棧,該協議棧提供了完整的路由協議,并對應用層是完全透明的,只需將數據下發至協議棧,協議棧便會自動尋找路徑,因此在程序開發上,主要是在Z-stack協議棧的基礎上,完成協調器節點和傳感器節點的程序設計。
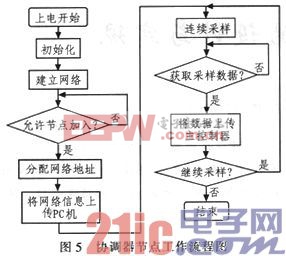
1)協調器節點的軟件設計
協調器節點是整個網絡的核心,負責網絡的建立和管理,工作流程圖如圖5所示。系統上電后,首先初始化硬件和協議棧,初始化完成后,協議棧掃描出一個合適的信道建立一個網絡。當有設備請求加入時,協調器負責分配它一個16位的短地址,并允許加入網絡,組網完成后,協調器節點開始接受從傳感器節點傳送過來的數據并通過串口傳至嵌入式控制器。本文引用地址:http://www.104case.com/article/159594.htm
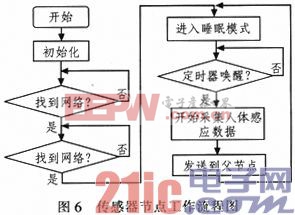
2)傳感器節點的設計
傳感器節點工作流程圖如圖6,其主要通過無線傳輸的方式,將采集到的人員信息送至協調器節點。完成CC2430的初始化后,開始掃瞄信道,尋找到合適的網絡,發進加入網絡信息,得到確認后,開始進入休眠狀態,等待定時器喚醒,收到喚醒指令后,開始通過傳感器采集信息,并發至其父節點。
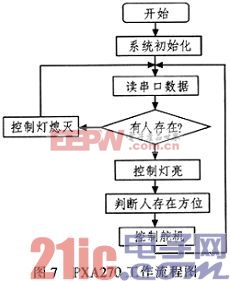
3.2 嵌入式控制器的軟件設計
PXA270通過串口接收Zigbee節點采集到的信息,根據Zigbee的16位物理地址和相應采集到人是否存在的信息來確定人員的方位,工作流程如圖7所示,首先,檢測是否有節點返回有人存在的信息,如果無人存在,則把I/O口的輸出設置為低電平,使燈熄滅,否則,I/O設置為高電平,燈亮起,然后根據返回的Zigbee的物理地址,判斷是哪個節點返回的信息,從而確定人員存在的大致方位,進而控制舵機轉動,使燈光照向這個方位。
4 系統測試
實驗時,在實驗室搭建了1個小的模型,其中的無線傳感器網絡包含1個協調器節點和3個傳感器節點(Zigbee節點實物如圖8),傳感器節點均勻地分布在走廊的兩側,PXA270和照明裝置(實物如圖9)放在了較高的柜子上。
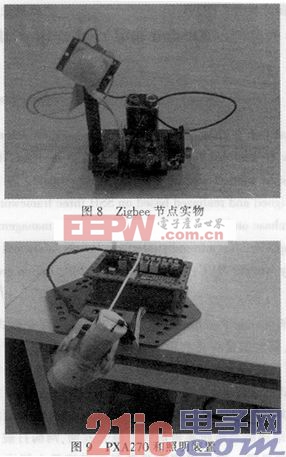
Zigbee節點上電后,過了大約5 s,開發板上的led顯示網絡建立完成,當人走過時,燈自動的開啟,舵機轉動,照向人存在的方位,當人走動的時侯,舵機隨之轉動。當人離開檢測區域時,照明裝置自動熄滅,實驗結果表明,該系統可以正常工作。
5 結束語
文中采用無線傳感器技術、Zigbee技術、傳感器技術、嵌入式技術和計算機技術構建智能燈光跟隨系統,實現對人體的檢測并使燈光跟隨人體移動,從而達到節能環保的效果。本系統具有成本低、低功耗、檢測準確、實用性強等特點,非常適合在走廊、道路等場所使用,具有很好的經濟效益和社會價值。目前,我們尚處在實驗階段,正在進行產品化過渡。







評論