基于改進下垂法控制器的光伏并聯運行控制策略

由于要兼顧系統控制線性負載和非線性負載兩種情況,Zvo(s)應在基頻段呈現感性,在諧波頻段呈現阻性。故可設計如下虛擬阻抗來實現系統對輸出阻抗的校正,即:Zvir=ωps/(s+ωp),則可得:
實際中ωp的選取不宜過大。當采用虛擬阻抗法來校正輸出阻抗時,實際是以降低系統的穩態精度為代價來提高其均流效果。因此還應綜合考慮系統的均流效果和穩態指標,實現優化設計。
5 仿真與試驗
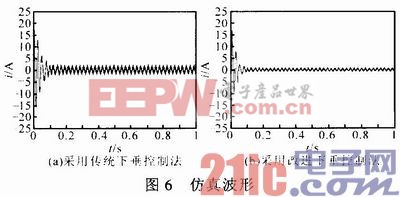
為驗證所提出虛擬阻抗法的正確性,在Matlab/Simulink中建立仿真模型,光伏電池單元參數設置如下:Rsh=10 kΩ,Rs=0.2 Ω,T= 300 K,A=2.8;光伏電池組件參數設置為:Rsh=10kΩ,Rs=0.8Ω,A=0.02。考慮到各光伏單元的連接和實際等效問題,Λ的取值比實際計算值13.68 V-1小得多。負載ZL=50 Ω,L1=810μH,L2=880μH,C=25μF,額定輸出功率S=1 kVA,額定頻率f=50 Hz,額定電壓U=314 V。下垂系數n=10-4V/var,m=10-4 rad/(w·s),nd=4.5×10-7V·S/var,md=4.5×10-7(rad·s)/w。濾波器截止角頻率ωc=10 rad/s。圖6為啟動循環電流的仿真波形。可見,盡管最初的峰值電流由于逆變器初始相位不同而有所區別,但采用虛擬阻抗器的下垂控制策略比傳統的下垂控制策略有更快的動態響應和更少的循環電流。本文引用地址:http://www.104case.com/article/159586.htm
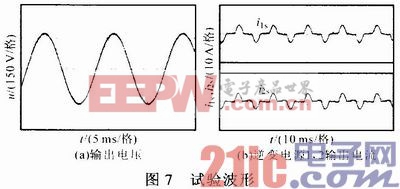
為進一步驗證所提出的改進下垂控制法的合理性,在一套額定功率為1 kW的試驗平臺上進行測試。每一個逆變器由型號為IKW20N60T的IGBT管和LC輸出濾波器組成,參數如下:L=1 mH,C=30μF,U0=220 V/50 Hz。逆變器的控制器由三環控制構成。內部電流環控制器和外部PI控制器用來調節電壓。負載控制器則采用了型號為TMS320LF2407A的數字處理器。圖7a為并聯系統的輸出電壓波形,圖7b為兩個逆變電源的輸出電流波形。可見,即使負載是非線性負載,系統的運行效果依舊良好。
6 結論
根據光伏電源并聯運行的研究,提出了一種基于改進下垂法的并聯運行控制策略。引入了虛擬阻抗的概念,設計了一種新型控制器,并在試驗平臺上進行了研究。仿真和試驗結果表明,該控制策略能迅速抑制系統啟動循環電流,獲得了更好的動態響應特性,是一種較為理想的控制策略。



評論