基于改進下垂法控制器的光伏并聯運行控制策略

圖中下標1表示逆變電源1的變量:下標2表示逆變電源2的變量:下標0表示負載變量:下標b表示向量的基波分量:下標h表示向量的諧
波分量;ω0為輸出電壓的基波角頻率;hω0為輸出電壓的諧波頻率。
由圖3可見,未采用虛擬阻抗法時,逆變電源是通過一串聯連接阻抗與負載相連;采用虛擬阻抗法后,逆變電源則分別通過等效阻抗相并聯。當然該阻抗不是真的物理器件,而是通過控制逆變電源產生的等效阻抗,并且輸出阻抗在輸出電壓的不同頻段表現出不同的特性。
4.2 電流反饋對輸出阻抗中阻性部分r的抑制
由圖1可得該系統的主電路狀態方程為:
式中:D為器件開關狀態的控制變量,有1,0和-1三態。
在逆變電源的控制模塊中,系統是依據輸入的正弦波和三角波比較而得的脈沖來控制功率開關器件。由于實際情況中開關是不連續的狀態,因此采用狀態空間平均法建立連續狀態平均模型進行分析,得到系統輸出電壓的動態模型為:
在此采用電感電流反饋控制,系統輸出電壓雙環復合控制結構如圖4所示。本文引用地址:http://www.104case.com/article/159586.htm
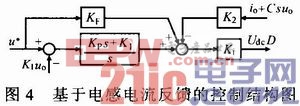
由圖4可得:
![]()
式中:Kp為PI調節比例系數;K為PI調節積分系數;KF為前饋調節系數。
聯立式(3),(4)可得:
![]()
由式(5)可見,當KiK2>>r時,基于電感電流反饋的系統輸出阻抗中r對系統的影響大大減弱。
由電路的二端網絡定義可知,逆變電源可建立如下等效電路模型:

式中:Zo(s),G(s)為逆變電源輸出阻抗和電壓放大系數。
4.3 虛擬阻抗法對輸出阻抗的校正
當逆變電源帶非線性負載運行時,系統輸出電流中含有大量諧波,其輸出阻抗高端不能呈現好的電阻特性。可運用虛擬阻抗自校正來調節輸出阻抗特性,圖5為其控制結構示意圖,有:

式中:Zvir(s)為虛擬阻抗;Zvo(s)為采用虛擬阻抗法的系統等效輸出阻抗。




評論