無(wú)觸點(diǎn)控制的汽車(chē)CAN總線(xiàn)燈光系統(tǒng)研究設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
2.2 燈光控制盒方案
燈光控制盒方案包括:燈光總成、驅(qū)動(dòng)電路陣列、控制核心單元、電源穩(wěn)壓電路和CAN總線(xiàn)驅(qū)動(dòng)電路等。系統(tǒng)總體框圖如圖6所示。本文引用地址:http://www.104case.com/article/159559.htm

控制核心采用飛思卡爾單片機(jī)MC9S08DZ60,其外圍電路以及電源穩(wěn)壓和CAN總線(xiàn)驅(qū)動(dòng)與總控制盒相同。車(chē)燈驅(qū)動(dòng)電路陣列采用飛思卡爾的功率驅(qū)動(dòng)芯片MC33286,其輸入與TTL電平相兼容,可以由微控制器直接進(jìn)行控制,共有四路輸出,OUT1由IN1控制,OUT2由IN2控制。CAN收發(fā)器接收CAN總線(xiàn)上傳輸?shù)臄?shù)據(jù),送給微控制器進(jìn)行識(shí)別,若與之匹配則選擇接收信息,并進(jìn)行處理,往驅(qū)動(dòng)陣列發(fā)送控制信號(hào),進(jìn)而控制車(chē)燈。
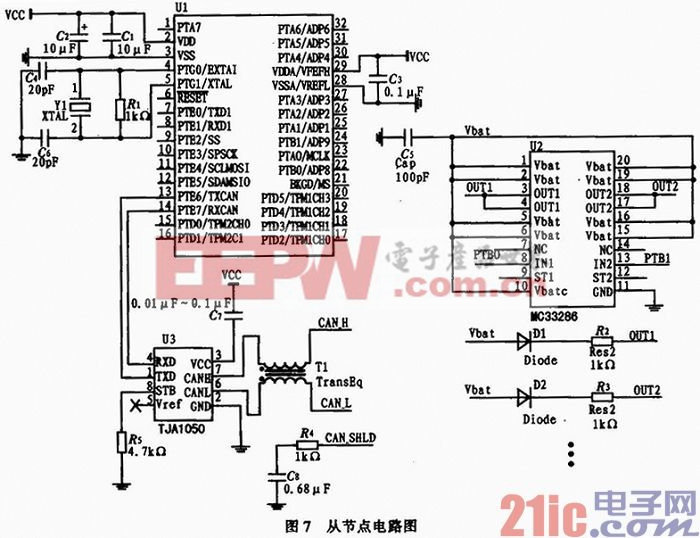
前燈組合和后燈組合的設(shè)計(jì)類(lèi)似,其中前燈包括近光燈、遠(yuǎn)光燈、前霧燈、示寬燈、轉(zhuǎn)向燈,所有燈光均連接處一個(gè)公共端,燈光組合與驅(qū)動(dòng)板之間只需一個(gè)8芯接插件連接。后燈包括轉(zhuǎn)向燈、尾燈、剎車(chē)燈、霧燈和倒車(chē)燈。前燈組合電路如圖7所示。
3 系統(tǒng)軟件設(shè)計(jì)
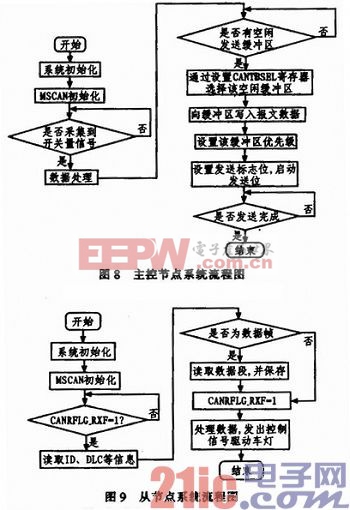
文中采用模塊化程序設(shè)計(jì)思想設(shè)計(jì)軟件,按照功能分成不同的程序模塊,各模塊間相對(duì)獨(dú)立以完成特定的功能。主要包括CAN初始化模塊、報(bào)文發(fā)送與接收、開(kāi)關(guān)量信號(hào)采集、數(shù)據(jù)處理模塊等。其設(shè)計(jì)思想為:系統(tǒng)啟動(dòng)后,首先對(duì)微控制器MC9S08DZ60以及內(nèi)嵌的CAN控制器進(jìn)行初始化,再對(duì)主控節(jié)點(diǎn)和各個(gè)從節(jié)點(diǎn)進(jìn)行設(shè)計(jì):1)主控節(jié)點(diǎn)首先要采集霍爾開(kāi)關(guān)上的開(kāi)關(guān)量信號(hào),并對(duì)這些信號(hào)進(jìn)行處理,形成符合CAN通信協(xié)議SAKJ1939的數(shù)據(jù)格式,再向CAN控制器發(fā)送信號(hào),進(jìn)入CAN收發(fā)器發(fā)送數(shù)據(jù)程序(數(shù)據(jù)的發(fā)送采用查詢(xún)方式),將處理完畢的數(shù)據(jù)發(fā)送到CAN總線(xiàn)上,供從節(jié)點(diǎn)進(jìn)行接收,其流程圖如圖8所示。2)采用查詢(xún)方式接收數(shù)據(jù),首先從節(jié)點(diǎn)上的CAN控制器通過(guò)比較29位標(biāo)識(shí)符是否匹配,來(lái)決定能否接收?qǐng)?bào)文,在處理接收到的數(shù)據(jù)時(shí),判斷是開(kāi)關(guān)量信號(hào)是對(duì)應(yīng)哪些燈的,發(fā)出相應(yīng)的控制信號(hào)來(lái)驅(qū)動(dòng)車(chē)燈的亮滅,其流程圖如圖9所示。
4 結(jié)束語(yǔ)
文中以飛恩卡爾公司的S08D系列單片機(jī)中的MC9S08DZ60為核心,利用霍爾元件結(jié)合CAN總線(xiàn)技術(shù),設(shè)計(jì)了無(wú)觸點(diǎn)汽車(chē)CAN總線(xiàn)燈光控制系統(tǒng),給出了整體設(shè)計(jì)方案和軟件流程圖。系統(tǒng)實(shí)現(xiàn)了開(kāi)關(guān)量信號(hào)的采集,通過(guò)CAN總線(xiàn)的通信以及對(duì)各個(gè)從節(jié)點(diǎn)車(chē)燈的控制,驗(yàn)證了方案的可行性和可靠性。試驗(yàn)證明,文中介紹的CAN總線(xiàn)的通信在汽車(chē)電子控制方面有較強(qiáng)的優(yōu)勢(shì),在現(xiàn)代汽車(chē)電子領(lǐng)域有著廣泛的應(yīng)用前景。





評(píng)論