無觸點控制的汽車CAN總線燈光系統研究設計

1.3 CAN總線
CAN是控制器局域網絡(Controller AreaNetwork,CAN)的簡稱,是由研發和生產汽車電子產品著稱的德國BOSCH公司開發了的,并最終成為國際標準(ISO11898),是國際上應用最廣泛的現場總線之一。通常CAN總線采用屏蔽或非屏蔽的雙絞線,總線接口能適應極其惡劣的工作環境。和其他通信總線相比,CAN總線在其實時性、可靠性及靈活性等方面都有突出的優勢,使得其在汽車工業得到了廣泛的應用。
CAN總線的應用層協議,采用了SAE J1939通信協議,它以CAN2.0B協議為基礎,波特率可達250 kb/s,是一種傳輸速率較高的C類通信網絡協議,支持分布式控制,在整個汽車電子控制系統中,實施雨環控制及其通信。在CAN總線進行數據通信的過程中,SAE J1939協議的數據鏈路層定義了信息幀的數據結構、編碼規則,它負責將CAN擴展幀的29位標識符重新分組定義,使報文的標識符就能夠描述報文的全部特征,包括目標地址、源地址等。
CAN總線框架不僅提供發送端和接收端之間明確的地址,同時向在總線上的各類型的接收端發送消息幀。CAN總線的消息幀結構如圖3所示。在幀起始處都會有11位的標識符(或19位擴展),用來標記消息幀。本文引用地址:http://www.104case.com/article/159559.htm
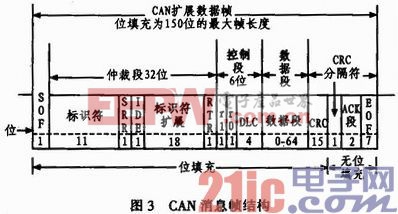
當發現總線空閑時,如果存在有2個或更多的總線單元需要進行CAN通信時,可利用CSMA/CD以及“非破壞性的逐位仲裁”方法來避免消息沖突。
2 系統硬件設計
系統總體硬件設計的目的是實現高效、可靠的車燈控制系統。該系統主要由總控制盒、前燈模塊和后燈模塊組成。總控制盒主要采集霍爾開關輸出的信號,同時對信號進行編碼處理,并將得出的數據發送到CAN總線上,以供各個分節點識別接收。前燈模塊和后燈模塊根據用戶定義的標識符選擇接收CAN總線上傳輸的數據,對接收到的數據進行分解處理,然后對相應的驅動設備發送控制信號,實現對車燈的控制。
2.1 總控制盒設計
本設計總控制盒包括以下幾個部分:核心控制器、組合開關輸入、儀表指示燈輸出、電源穩壓電路和CAN控制驅動電路。系統總體框圖如圖4所示。

核心控制器采用飛恩卡爾8位單片機MC9S08DZ60,其提供了內嵌的CAN控制器,使得系統的設計大大簡化,同時也提高了系統可靠性和抗干擾性。MC9S08DZ60主要負責采集開關量信號,同時進行處理,對不同的開關信號可由用戶自定義的地址進行賦值,最后將數據通過CAN控制器發送到總線上。
組合開關輸入部分主要包含車燈組合霍爾開關以及各個開關量的輸入接口電路。其中霍爾開關用于提供開關量控制信號,AH11系列是單磁極工作的霍爾開關,適合于矩形或者柱形磁體下工作。當磁鋼靠近霍爾開關時,磁感應強度增大到其工作點時,輸出低電平;反之,當磁感應強度減小到釋放點時,輸出高電平。這種開關形式類似于晶體管集電極的開路。接入電路時應將霍爾開關的輸入端上拉至5 V,再直接接到控制器的端口。
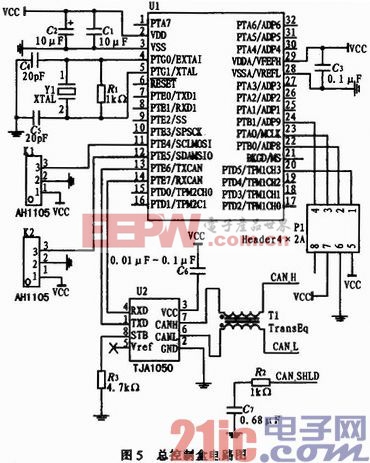
至于CAN通信電路,由于MC9S08DZ60內嵌CAN控制模塊,本系統中只需外接CAN收發器TJA1050即可,TJA1050是一款高速CAN收發器,與以往CAN通信系統中采用的PCA82C250/251引腳相兼容,TJA1050還提供不上電環境下理想的無源特性。核心控制器的TXCAN和RXCAN分別與收發器的TXD和RXD連接,同時在CANH和CANL之問接入TDKZJS-2,能夠很好的保護CAN總線通信免受電磁干擾,并且又不影響總線的正常通信。總控制盒電路圖如圖5所示。





評論