基于STM32W的老人心率實時監測及跌倒檢測系統

*姿態角判斷
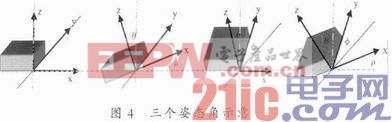
在三維中間中,我們將人體沒想成一個方塊,利用三軸加速度和重力的關系,我們可以得到三個姿態角ρ、θ和φ,如圖4所示。通過判斷姿態角的變化,得出身體的姿態變化。

其中:ρ是X軸與水平面間的夾角;θ是Y軸與水平面之間的夾角;φ是Z軸與重力加速度方向間的夾角。本文引用地址:http://www.104case.com/article/159444.htm
1.4 硬件組成和設計
考慮到沒備的便攜性,我們采用腰掛式,具體的實現方案如下:采用Li-ion電池供電,由于系統的電源是3.3 V,而Li電池的電池電壓范圍為2.5V-4.2 V,所以方案采用TI的TPS63031DC—DC升降壓芯片。
*STM32W芯片采用系統的3.3 V作為主電源,內核和存儲區域的電源有芯片內部的穩壓器提供;外部時鐘源為24MHz高頻晶體振蕩器和32.768kHz低頻晶體振蕩器;RF使用的是陶瓷天線。
*ECG信號采集采用了織物式電極,兩處電極分別位于被測者的右胸和腹部;電極輸入前端有ESD保護,輸入阻抗匹配;心電數據存儲芯片選用AT24C02,2kB的e2PROM。
*三軸加速度傳感器采用的是ADI公司數字式傳感器ADXL345,超低功耗,分辨率可達到3.9mg/LSB,能夠測量不到1°的傾斜角變化;I2C通信方式。
*采用1.1寸的OLED屏幕顯示系統的狀態信息,三個功能鍵和一個電源按鍵。
2 軟件設計
STM32W的開發是基于EmberZNet協議棧的,它是ST公司為用戶提供的開發包,內部包含了豐富的API函數,用戶只需調用API即可完成相關功能。EmberZNet應用程序類似于一個操作系統,系統處理所有的模塊程序都是以任務調度的形式完成,即:監控任務(Housekeeping Tasks)。系統主要的任務有:網絡維護任務和處理器維護任務,后者包括功能按鍵采集任務、心率檢測和備份曲線任務、三軸加速度傳感器數據采集任務及跌倒算法任務。
2.1 網絡維護任務
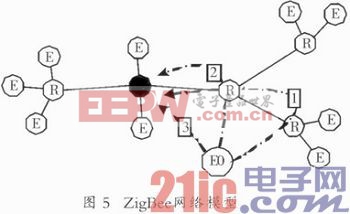
應用程序中負責管理網絡相關性的任務有:檢測網絡、加入網絡、網絡維護。網絡拓撲結構如圖所示,設備開機工作,在完成初始化以后,必須要加入到既定的家庭網絡。通過調用emberStartScan函數完成信道掃描和網絡的發現,調用emberScanCompleteHandler函數查看掃描的成功與否,調用mberNetworkFoundHandler查看掃描結果。在加入網絡之前,需要手動選擇自己家庭的PAN ID。配置相關網絡參數,選擇一個父節點,然后調用emberJoinNetwork函數加入到網絡。
在加入到網絡以后,作為移動端設備的E0是不需要綁定路由的,它必需通過周期性的輪詢(定義為5s)與父節點保持聯系,確保自己“在線”。如果周期性的輪詢丟失聯系,要重新加入網絡,調用emberRejoinNetwork函數。如圖5所示,E0到協調器的傳輸路徑可以是1、2或3。







評論