基于GSM雙音多頻信號控制的小車設計

1.2 雙音多頻及其編解碼器
雙音多頻信號是音頻電話的撥號信號,它本不用于數據信號的傳送,而是傳送控制信號,并指定了每兩個音頻信號的間隔為600 ms。每一個號碼由兩個音頻信號組成,該雙音頻由按鍵所在的行和列對應的頻率決定,如圖2所示。每按下一個數字,則行與列的對應輸入端為低電平。這樣,就形成一種雙音頻組合,以產生相應的雙音多頻信號。終端上的5個數字按鍵(2、4、6、8、5)分別同步產生兩個頻率和兩個相差4 dB幅度的信號,此信號通常由RC網絡電路產生。加拿大Mitel公司生產的雙音多頻信號編/解碼芯片系列芯片是該系列產品中較新的一種,該芯片功能強、功耗低、工作穩定可靠,廣泛應用于程控交換機、無線通信設備、移動通信等系統中。項目使用MT8880編碼器芯片,它由兩個二階數字正弦波振蕩器構成,一個用于產生行頻,一個用于產生列頻。對雙音多頻信號進行高精度解碼并不容易,接收設備對2%的偏差能可靠地接收。這里使用MT8870D解碼器芯片,其內部使用了6階濾波,能減少失真并產生理想的正弦信號。本文引用地址:http://www.104case.com/article/159431.htm

1.3 步進電機的控制
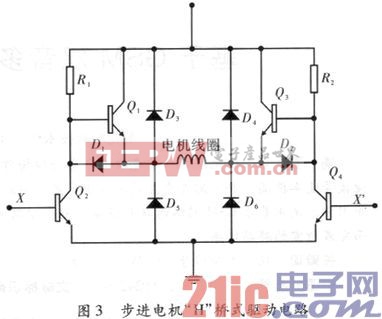
項目使用混合式步進電機,它是一種將電脈沖轉化為角位移的執行機構,利用電子電路將直流電變成分時供電,多相時序控制電流。步進電機的驅動電路通常被稱為H橋式電路,如圖3所示。當X是邏輯“1”、X’是邏輯“0”時,Q2閉合,Q1打開,而Q4使Q3閉合。電源電流經Q1從左至右流過電機線圈,接著流向D2和Q4到地。當X是邏輯“0”、X’是邏輯“1”時,電流流向Q3,從右至左流過電機線圈,然后到D1和Q2再到地。那么以電流的方向形成序列的形式,并可通過序列的改變使步進電機作逆時針方向轉動。如圖4所示,電流經過線圈X和線圈Y時,兩個重疊的電磁鐵,并驅動轉軸轉動。當電流經過線圈X的方向改變時,轉軸轉動,線圈Y電流的方向改變相繼將轉軸轉動,重復以上步驟,步進電機能進行連續單向轉動。此系統使用步進電機驅動芯片L293,它是多相時序控制器。單片機需把雙音多頻信號解碼進行處理以符合驅動步進電機的序列要求。










評論