基于神經網絡的感應電動機直接轉矩控制研究

4 實驗結果
實驗采用電機為三相鼠籠式異步電動機,測得磁通的α,β分量波形如圖5a所示,電機氣隙磁通軌跡如圖5b所示。本文引用地址:http://www.104case.com/article/159427.htm
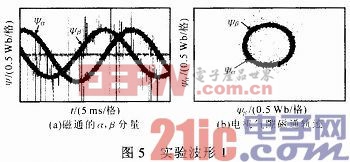
可見,電機的氣隙磁場分布更加均勻,進一步改善了電機控制的性能。將該系統應用在礦山的牽引變頻電機上取得了良好的效果。
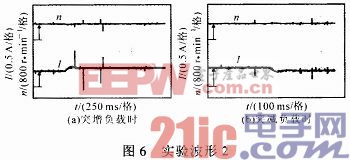
圖6為系統突增負載和突減負載運行時電流、轉速動態波形。可見,波形穩定平滑,超調量約為0.8%,動態速降約為5 r·min-1,靜差率約為零。電機實現無靜差調節且方便實現可逆運行。
5 結論
感應電動機的直接轉矩控制具有結構簡單,控制信號處理的物理概念明確,系統的轉矩響應迅速且無超調等優點,是一種具有高靜態、動態性能的交流調速控制方式。將神經網絡控制和直接轉矩控制相結合,由于神經網絡結構簡單,具有并行計算能力,縮短了計算時間,且控制算法不依賴或不完全依賴于對象模型,僅取決于系統的實際偏差及變化率,具有容錯能力,因而系統具有較強的魯棒性和對環境的適應性,使進一步提高開關頻率成為可能,提高了系統的控制性能。

電動機相關文章:電動機工作原理設計
施密特觸發器相關文章:施密特觸發器原理





評論