帆板角度控制系統的設計與實現

4 軟件部分
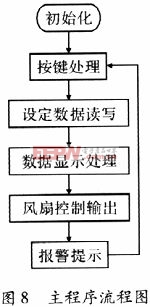
總程序流程圖如圖8所示,程序采用模塊化設計,分成幾部分的獨立子程序。首先是按鍵判斷子程序,采用矩陣式按鍵的掃描方式來編寫程序,當有鍵按下時把相應的鍵值存儲在RAM中,主程序根據鍵值來判斷執行哪一段程序。設定數據有兩種,一種是設定P值0~100%,對應帆板的角度,另外一種是設定A在0°~60°,同樣,帆板的轉角也會到達相應的設定值,然后進行數據顯示處理,然后調整PI值進行風扇轉速控制輸出,如果帆板進入設定值的絕對值5°內,則紅色發光二極管閃亮3次,同時蜂鳴器響3下;如果沒有進入,則發光二極管不亮、蜂鳴器不響。本文引用地址:http://www.104case.com/article/159399.htm
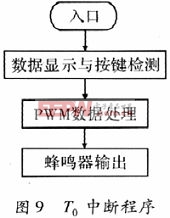
T0中斷是數據顯示和按鍵檢測、PWM數據處理、蜂鳴器輸出程序。如圖9所示。
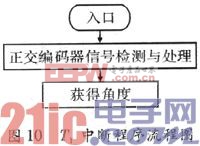
T1中斷是正交編碼器信號檢測和處理程序,如圖10所示。
T2中斷產生PWM,脈寬調整。如圖11所示。

5 系統調試與測試結果
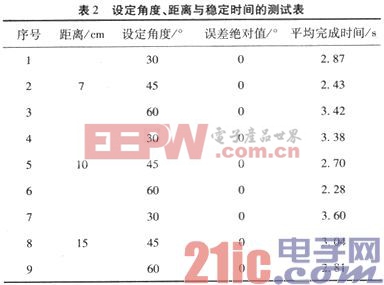
(1)用手轉動帆板,能顯示帆板的轉角度數。角度范圍為0°~60°,分辨力為1°,經測試系統誤差值為0°。(2)當間距d=7~15 cm時,通過操作鍵盤控制風力大小,控制帆板轉角θ,θ在0°~60°,要求控制過程在5 s內完成,并實時顯示,且有聲光提示。
6 結束語
經測試,系統性能達到了設計要求,帆板角度控制屬于自動化控制類,設計采用槽型光耦加360線光柵片組成的傳感器能精確定位角度,是一種良好的角度控制傳感器,再利用PID算法控制PWM參量,從而控制風扇的轉速。

陀螺儀相關文章:陀螺儀原理












評論