一種改進的無線傳感器網絡節點定位技術

三邊測距算法確定未知節點坐標的思想如圖2所示。本文引用地址:http://www.104case.com/article/159376.htm
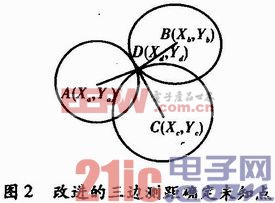
由于三邊測距算法基于兩條直線的交點來估算未知節點的坐標,未充分利用A,B,C 3個節點的坐標信息,使估算的未知節點的坐標可能存在較大誤差。
在圖3中,根據式(1)~式(3)可解出圓A與圓C的交點Mac1(xac1,yac1)和Mac2(xac2,yac2),圓B與圓C的交點Mbc1(xbc1,ybc1)和Mbc2(xbc2,ybc2);圓A與圓B的交點Mab1(xab1,yab1),Mab2(xab2,yab2)。通過將圓A與圓C交點Mac1(xac1,yac1),Mac2(xac2,yac2)代人式(x-x2)2+(y-y2)2,判斷大小即可找出兩點距圓B的圓心較近的點,假設為Mac1(xac1,yac1)。同理可找出圓B,圓C交點中距圓A較近的點設為Mbc1(xbc1,ybc1),圓A,圓B交點中距圓C的圓心較近的點設為Mab2(xab1,yab1),依據質心思想估算未知節點D的坐標為
![]()
從上述分析可知,若要對未知節點的定位誤差進行補償首先需要獲得信標節點的坐標誤差。獲得信標節點坐標誤差的過程中,由于取不同的3個信標節點做三邊定位同樣會得到不同的測量值,需要用這些測量值來得到最終的信標節點A0的計算坐標。文中采用加權質心算法來計算信標節點的計算坐標,如圖3所示。
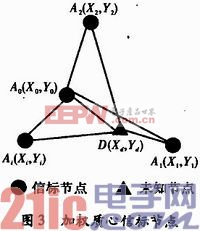
假設A01,A02,A03,…,A0n為A0坐標的多個不同測量值;A0’為A01,A02,A03,…,A0n的質心;d1,d2,…,dn為坐標A0到坐標A01,A02,A03,…,A0n的距離。
定義1 信標節點的計算坐標

為加權因子,表示坐標Aoi的權重,離質心A0’的距離越近,所占的權重則越大;xi為Aoi的X坐標值,yi為Aoi的Y坐標值所以信標節點的坐標誤差為
![]()
式中,x為信標節點X坐標實際值;xc為信標節點計算坐標X值;y為信標節點Y坐標實際值;yc為信標節點計算坐標Y值。信標節點的坐標誤差反映了系統針對該節點附近區域的定位能力。
然而在定位系統實際應用過程中,未知節點B未必恰好處于某個信標節點附近,而可能離各個信標節點距離相當,因此并不能按照理想情況直接用A0的坐標誤差去補償未知節點B的坐標誤差。但是,每個信標節點所在區域的定位誤差都可以通過信標節點坐標誤差來反映,綜合考慮所有信標節點坐標誤差就可得到由信標節點所構成的區域定位誤差,只要未知節點B處于該區域內,其坐標誤差就可以用該誤差進行補償。這里的區域大小需根據網絡不同的精度要求和節點密度來具體設定。如圖2所示,當未知節點B處于由信標節點A1,A2,…,Ai構成的區域時,先通過RSSI值計算出這些信標節點和自身的距離,然后綜合各個信標節點的的坐標誤差可得出未知節點所在區域的定位誤差。

萬能遙控器相關文章:萬能遙控器代碼










評論