自由擺平板控制系統的分析與設計

摘要:文章給出了一個基于自由擺的平板控制系統的設計與構建,系統以STC12C5A16S2型單片機為控制核心,經角度傳感器MMA7455、直接數字式頻率合成器(DDS)、混合式步進電機42BYGH4417及必要的外圍驅動電路,實現平板隨著擺桿的擺動而旋轉,平板上的8枚硬幣隨擺桿擺動不滑落,平板上的激光筆在15s內照射到指定的中心線位置。
關鍵詞:自由擺;單片機;角度傳感器;DDS;步進電機
0 引言
現代檢測技術和自動控制理論的飛速發展,能夠使得人們設計高精度的控制系統,基于自由擺的平板控制系統就是這些技術和理論的應用實例之一。
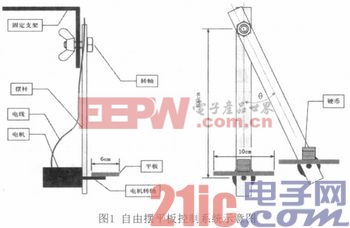
本文所討論的自由擺平板控制系統如圖1所示,該系統可以實現如下功能:(1)控制電機使平板隨著擺桿的擺動(3~5周)而旋轉,擺桿擺一個周期,平板旋轉一周(360°),偏差絕對值小于45°。(2)在平板上粘貼一張打印紙,在平板中心穩定疊放8枚1元硬幣,用手推動擺桿至一個角度θ(θ在45°~60°間),調整平板角度,啟動后放開擺桿讓其自由擺動。在擺桿擺動過程中,硬幣在擺桿的5個擺動周期中不從平板上滑落,并保持疊放狀態。(3)在平板上固定一激光筆,光斑照射在距擺桿150cm距離處垂直放置的靶子上。擺桿垂直靜止且平板處于水平時,調節靶子高度,使光斑照射在靶紙的某一條線上,標識此線為中心線。用手推動擺桿至一個角度θ(θ在30°~60°間),啟動后,系統應在15s內控制平板盡量使激光筆照射在中心線上(偏差絕對值1cm),完成時以LED指示。
1 系統方案選擇與論證
1.1 電機模塊的選擇與論證
電機是整個系統用于控制的不可缺少部分。電機的選擇不但要有快速的反應還要有準確的轉動角度以配合整個系統的運行。
方案一:采用普通直流電機。直流電機具有良好的調速特性,調速平滑、方便,調整范圍廣;過載能力強,能承受頻繁的沖擊負載,可實現頻繁的無級快速啟動、制動和反轉;能滿足生產過程自動化系統各種不同的特殊運行要求。
方案二:采用步進電機。步進電機的顯著特點就是能快速啟動和停止,而且在程序上控制相對容易,如果負荷不超過步進電機所能提供的動態轉矩值,就能使步進電機啟動和反轉。另一個顯著特點就是轉換精度高,正轉反轉控制靈活。
方案三:采用金屬齒輪微型舵機,舵機具有體積小、輸出力矩大、控制簡單等優勢,但不能簡單完成轉動360°的要求。
綜合以上,選擇方案二。
1.2 控制器系統的選擇與論證
控制器系統是整個系統的核心,控制著數據的采集和發送,控制器的性能好壞決定了整個系統的準確性。控制器要求運算速度較快,數據傳輸接口豐富易用。
方案一:采用STC12C5A16S2作為控制核心。51單片機價格低廉、使用簡單、軟件編程自由度大,可用編程實現各種控制算法和邏輯控制,但其運算速度較低,增大了硬件電路設計與控制過程的復雜度。
方案二:采用FPGA作為系統的控制器。FPGA可以實現各種復雜的邏輯功能,規模大、密度高。但由于本設計對數據處理速度要求不高,FPGA的高速處理的優勢得不到充分體現,并且由于其集成度高,使其成本偏高,同時其芯片引腳較多,實物硬件電路板布線復雜,加重了電路設計和實際焊接的工作。
綜合以上,選擇方案一。
1.3 傳感器的選擇與論證
傳感器能進行平板的角度檢測,是一種被測量參數能按一定規律轉換成可用輸出信號的器件或裝置。傳感器是與被測對象直接有關聯的部分,其性能的優劣直接影響著檢測系統的精度,所以傳感器的正確選擇十分關鍵。
方案一:采用無觸點磁敏電位器,利用磁敏元件非接觸地感應磁場強度的變化,實現對角度的測量。但缺點是其頻響特性差、截止頻率低、精度低,不適用于機械安裝,電機的振動也影響其準確性。
方案二:采用加速度計,通過加速度計的旋轉,輸出值g,與平衡位置比較,可換算成水平傾角,讀取數據簡便,傳感器體積較小,也易于安裝在系統上進行測量。
綜合以上,選擇方案二。
2 系統設計
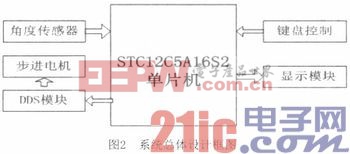
2.1 系統總體設計
系統的總體設計框圖如圖2所示,此系統是一個自動平衡測試系統,它由自由擺系統、檢測系統和控制驅動系統三大部分構成。












評論