無位置傳感器控制技術在直驅變流器中的應用

3 無位置傳感器控制技術
3.1 檢測原理
矢量控制中的轉子轉速和位置可通過電機反電勢的信號鎖相得到。但由于電機反電勢不能直接測量,僅能通過測量電機機端電壓推導電機反電勢,從而得到電機轉子的轉速和位置。
根據電機數學模型和d,q坐標變換,電機機端電壓與內電勢間的角度關系如圖3所示。本文引用地址:http://www.104case.com/article/159277.htm
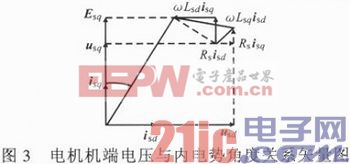
由于采用id=0控制策略,Esq對應內電勢電壓在轉子位置角下的q軸,Esd=0。△θ為兩者之間的相位差。根據圖3可知:
△θ=(usd+Rsisd-ωLsdisq)/(usq+Rsisq+ωLsqisd) (5)
當△θ=0時,此時得到的相位自動鎖到電機內電勢的相位,從而滿足控制目的。
3.2 控制策略
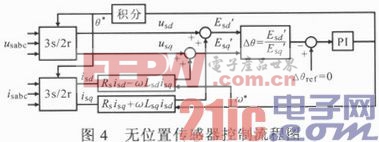
根據公式計算,通過采集電機機端三相電壓和三相電流,任意給定鎖相環,經坐標變換得到d,q軸分量,再通過計算△θ值,利用PI控制原理,控制△θ=0,從而實現跟蹤電機內電勢相位控制策略。控制流程框圖如圖4所示。
4 仿真研究
為驗證控制算法的正確性,搭建Matlab/Simulink仿真模型,仿真模型包括PMSM和一個背靠背三相變流器。其中PMSM可直接得到轉子速度和實時位置,可將發電機內部讀出的位置與基于無位置傳感器控制方法得到的位置進行比較,以驗證控制算法的準確性。系統仿真參數:直流電壓1 100 V,電機容量1 MW,電機電壓690 V,電機轉速18 r·min-1,電機極對數30,電機同步電抗Ld=1.9mH,Lq=3.22 mH。通過仿真,觀察轉子位置、轉速實測值與估計值間的差別。
為驗證轉子位置估計值的準確性,系統在1 s前控制算法采用的轉子位置為電機實測值投入,1s后切換到估計值,觀察切換瞬間對控制過程的沖擊,得到的仿真波形如圖5所示。
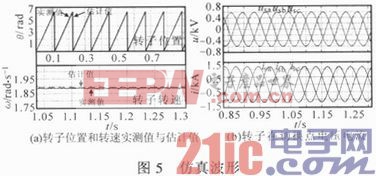
由圖5a可見,電機轉子位置及轉速估計值均能很快跟蹤到實測值,誤差很小,能取代實測值。由圖5b可見,在1 s前,控制策略采用實測值,機端電壓和電流較穩定;1 s后切換到估計值,電壓和電流切換較穩定,未出現過沖現象,進一步驗證了估計值能很好地跟蹤實測值。
5 現場應用
根據實際運行工況,電機轉速17 r·min-1,機側傳遞功率1.09 MW,觀察機側變流器運行狀態,實驗波形如圖6所示。
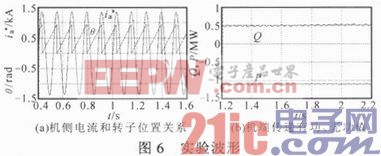
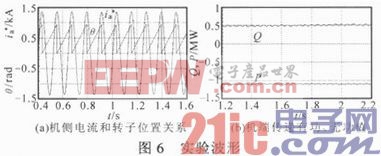
由圖6a可見,轉子電流(反向)與轉子位置角對齊,真實反映電機內電勢的相位。由圖6b可見,機側變流器傳輸功率為1.09 MW,運行平穩,機端功率因數正常。
6 結論
針對直驅風電機組廣闊的市場前景,提出一種基于機端內電勢檢測轉子轉速和位置的無位置傳感器控制方法。重點介紹了該方法的實現原理和控制策略,并在Matlab/Simulink仿真環境下搭建模型,驗證了該方法的有效性,并將其運用到實際工程中,效果顯著,具有很好的工程應用價值。
實踐證明,該方法在風機轉速范圍內,應用效果明顯,控制精度滿足要求,是無位置傳感器控制技術研究的重要方向。









評論