“數字城管”的在線式電子巡查管理系統

(3)RFID讀頭電路
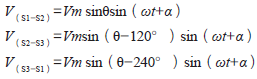
RFID讀頭電路采用了EM4095基站讀寫芯片,載波工作頻率為100~150 kHz,可以對EM400X、EM4050、EM4150等標簽進行操作。圖6為RFID讀頭電路原理,其工作頻率由以下關系式確定:
 |
 |
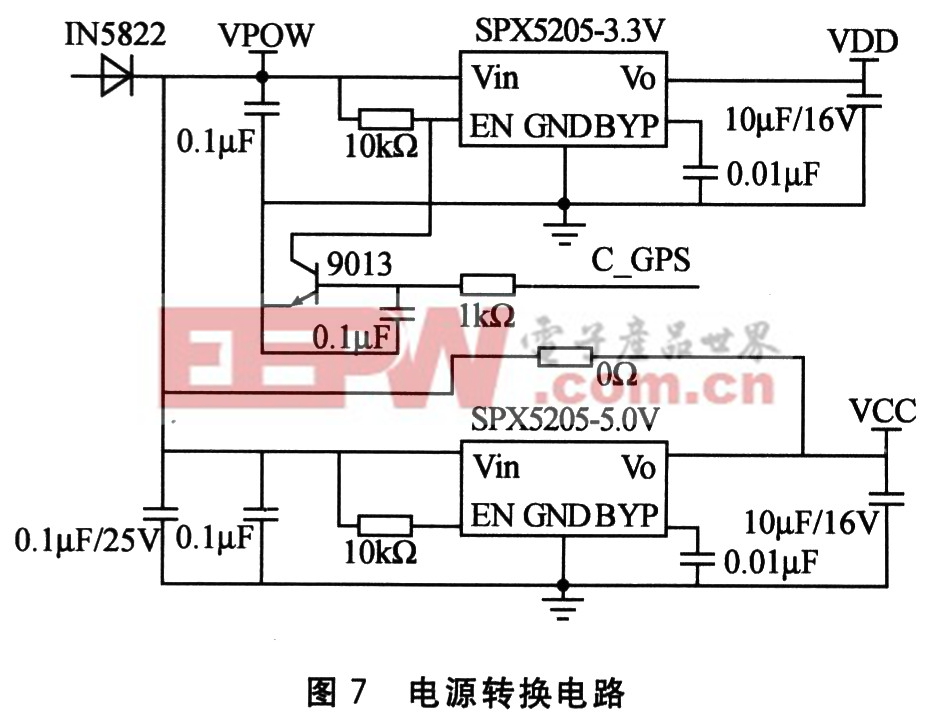
(4)電源管理模塊
巡查終端工作所需電源來自對講機,由于不同型號對講機對外提供的電源電壓不同,因此為了終端的兼容性,必須對來自對講機的電源進行處理;同時由于主控:MCU采用3.3 V電源供電,而GPS和RFID采用5 V供電,這要求電源電路能夠提供相應電壓。為了給終端提供穩定的工作電源,采用SPX5205-3.3和SPX5205-5線性電源轉換芯片。電源轉換電路如圖7所示。
(5)PTT控制電路
PTT控制電路用來控制對講機射頻發送信號,當PTT激活時,對講機將進行射頻信號發送。本設計中PTT由MCU來控制,當MCU有數據發送時,MCU先激活PTT,然后通過調制解調模塊將數據發送到音頻信道,從而實現模擬信號的調制發送。數據發送完后,MCU停止給調制解調模塊發送數據,經過一定的延時,MCU再關閉PTT。
結 語
隨著現代科學技術的發展,人們對城市巡查管理的要求不斷提高,城市安保人員需要配備多種裝備來完成日常巡查任務。離線式巡查管理系統實現了對安保人員巡查情況的準確了解,但因為數據的分析存在一定的滯后性,不能適應實時管理要求。通過對現有巡查管理裝備的研究分析,本設計對無線對講系統和巡查管理系統進行了融合,實現了巡查數據的無線實時傳輸。巡查終端采用了高度集成化的功能芯片,在普通肩咪中完成了GPS定位、射頻識別和數據的調制解調,實現了巡查裝備的集成化。基于WebGIS的系統設計,使該系統有機地融入到了“數字城管”系統平臺中,實現了的信息共享和協同管理。









評論