CAN-RS232通信轉換模塊的設計與實現

4 軟件設計
模塊的軟件設計主要包括RS232通信程序和CAN通信程序兩部分,采用中斷方式。其中,RS232通信數據傳輸的波特率為115200 bit/s,數據格式為1位起始位、8位數據位、1位停止位;CAN總線的傳輸波特率為500 kbit/s,采用PeliCAN模式的標準數據幀格式.每條報文的標識符ID為11位,有效數據為0-8個字節。其軟件流程如圖2所示。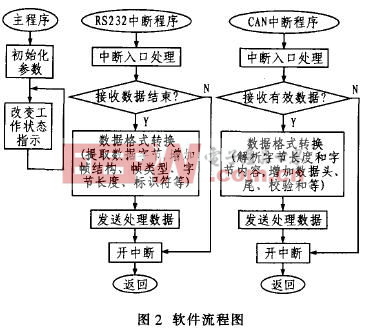
在RS232中斷程序中,微處理器對接收的串口數據進行處理后提取出數據字節,通過增加幀結構信息、幀類型、字節長度和標識符等生成CAN報文格式.然后由CAN控制器的發送緩沖區發送出去;
在CAN中斷程序中.微處理器對接收的有效CAN報文進行解析,提取出字節長度和字節內容,通過增加數據頭、數據尾和校驗和轉換為RS232通信格式,完成數據傳輸。
5 結束語
該設計已應用于筆者開發的項目一某型低空紅外預警系統。用CAN―RS232通信轉換模塊將CAN總線收到的角度傳感器測出的空中目標方位角和高低角(10 ms一組測角、波特率為500 kbifs)實時轉換為RS232(波特率為115200 bit/s)串行口數據,使主控計算機(PC104工控機)接收、處理和顯示;同時將RS232輸出的主控計算機命令轉換為CAN總線數據。經實踐證明,該模塊工作穩定、可靠,且成本低,完全能夠滿足系統的指標要求.取得了良好的應用效果

數字通信相關文章:數字通信原理
通信相關文章:通信原理










評論