μC/OSII的CAN驅動程序設計

摘要: 實時性是衡量CAN現場總線系統性能的一個重要標準。本文提出一種采用μC/OSII操作系統和ICAN協議,在應用層面上提高CAN總線系統實時性的驅動程序設計方案,并以分層的方式逐層闡述CAN驅動程序的設計過程。
本文引用地址:http://www.104case.com/article/156922.htm關鍵詞: CAN總線; μC/OSII; 實時性; 驅動程序
CAN Driver Design Based on μC/OSII※
Cheng Jin,Shi Guoliang
(College of Electronic and Information,Soochow University,Suzhou 215006,China)
Abstract: Realtime performance is an important measuring standard for the performance of CAN field bus system. A CAN driver design is proposed to improve the realtime performance of CAN bus system at the application level by using μC/OSII and ICAN protocol. The design process of CAN driver is introduced by a layered approach.
Key words: CAN bus; μC/OSII; realtime performance; driver
引言
CAN總線是德國Bosch公司于1983年針對汽車應用而開發的,一種能有效支持分布式控制和實時控制的串行通信網絡,屬于現場總線的范疇。其通信距離與波特率有關,最大通信距離可達10 km,最大通信波特率可達1 Mbps。CAN總線仲裁采用11位(CAN2.0A協議)和29位(CAN2.0B協議)標志,以及非破壞性仲裁總線結構機制,可以確定數據塊的優先級,保證在網絡節點沖突時最高優先級節點不需要沖突等待。CAN總線上的任何節點均可在任意時刻,主動向網絡上其他節點發送信息而不分主次,從而實現各節點之間的自由通信。目前,CAN總線協議已被國際標準化組織認證,技術比較成熟,已廣泛應用于汽車、工業、高速網絡和低價位多路連線等領域中。
μC/OSII是Jean J.Labrosse開發的一種小型嵌入式操作系統。它實質上是基于優先級的可剝奪型內核,系統中的所有任務都有一個唯一的優先級別,適合應用于實時性要求較強的場合。本文采用μC/OSII來設計CAN的驅動程序,以滿足系統的實時要求。
1 CAN節點的硬件設計
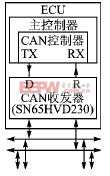
圖1 CAN節點基本結構
CAN節點是分布在CAN網絡中進行相互通信的基本單元,主要由主控制器、CAN控制器和CAN收發器組成。本設計中,節點的基本結構如圖1所示。在CAN網絡中,ECU(Electronic Control Unit)是指一個具有完整功能的CAN節點。
采用NXP公司的LPC2368作為CAN節點的主控制器。LPC2368是一款基于ARM7TDMIS內核的RISC處理器,包含2個兼容CAN2.0B規范的CAN控制器。每個CAN控制器擁有雙重接收緩沖器和三態發送緩沖器,具有快速的硬件實現的搜索算法,可以支持大量的CAN標識符。
LPC2368是一款3.3 V器件,雖然其對應的CAN收發器接口引腳能夠承受5 V電壓,但為了讓CAN節點能夠更穩定地運行,這里采用TI公司的3.3 V CAN收發器SN65HVD230D與之配合使用。憑借高輸入阻抗特性,SN65HVD230D可以在一條總線上支持多達120個CAN節點,并且能夠和5 V的CAN收發器良好地兼容。本文重點介紹CAN驅動程序的設計方法。
2 CAN驅動程序設計總體思想
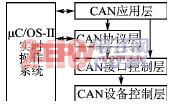
圖2 驅動程序分層結構
為了使軟件可移植性強、易于維護,采用分層的方法編寫CAN驅動程序。驅動程序分層結構如圖2所示。圖中,雙向箭頭表示實時操作系統μC/OSII與CAN驅動程序之間的數據交換,單向箭頭表示上層軟件對下層軟件的調用。
3 CAN設備控制層和CAN接口控制層
CAN設備控制層的主要任務是:初始化主控制器與CAN控制器之間的連接配置,復位CAN控制器,建立主控制器和CAN控制器之間的通信函數。由于LPC2368內部集成了CAN控制器,CPU可以通過內部APB總線接口對CAN控制器的所有寄存器進行訪問,所以不再需要編寫設備控制驅動層程序,已經完全由硬件實現了。
CAN接口控制層主要任務是:實現CAN控制器的各種功能,如設置控制模式、發送數據、釋放接收緩沖區、配置驗收濾波器等。這些操作都是通過讀寫CAN控制器的內部相關寄存器來實現的。







評論