連續超聲波位置跟蹤器的設計原理及其在虛擬現實系統中的應用實現

3.測距原理
在充分權衡傳統T.O.F方法、相位差法和多普勒頻移法的優缺點的基礎上,本文提出了一種新的測距方案:用一個音頻信號TM調制超聲載波TU,由超聲波換能器發射振幅被調制的連續式超聲波.接收器的輸出信號經過解調后得到調制信號RM,接收調制信號RM與發射調制信號TM之間的相位差ΔΦM正比于發射器到接收器之間的距離L.只要調制信號的頻率足夠低,使得它的波長大于最大測距范圍,相位差ΔΦM就一定小于2π.利用數字鑒相器測量ΔΦM,設聲音在空氣中的傳播速度為v,數字鑒相器的插值頻率為f1,鑒相器的計數結果為NM,則距離L1為:
L1=NMv/f1 (7)
但由于音頻調制信號的頻率較低,相位差ΔΦM的測量精度受到數字鑒相器分辨力和其它信號處理電路分辨力的限制,導致L的分辨力受到限制.為此,在保證L1的分辨率高于超聲載波波長λc的前提下,從接收到的AM調制信號中提取載波信號RU,用數字鑒相器測量發射載波信號TU和接收載波信號RU之間的ΔΦC,數字鑒相器的插值頻率為f2,鑒相器的計數結果為NC,則距離L可以表示為:
L=int(L1/λC)+NCv/f2
其中int(L1/λC)表示L1/λC的取整運算 (8)
和傳統的連續超聲波相位差測距法相比較,上述連續調幅超聲波測距法不僅繼承了測量范圍大、刷新頻率高、測距精度高等優點,而且克服了處理電路復雜和需要粗測基準的缺點.它也不同于音頻測距法,不會受到環境聲音的干擾,也不會造成環境聲音污染.
三、跟蹤器設計
1.測距單元設計
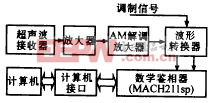
測距單元由超聲波發射機和接收機兩個模塊構成,兩個模塊的原理框圖如圖2和圖3所示.
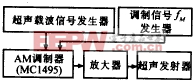
圖2 發射器電路原理框圖
圖3 接收器電路原理框圖 數字鑒相器的工作波形如圖4所示. 相關推薦技術專區 |










評論