雷達成像近似二維模型及其超分辨算法

| 2.SAR成像模擬 雷達參數為:中心頻率f0=24.24GHz,調頻率γ=33.357×1011Hz/s,帶寬B=133.5MHz,脈沖寬度tp=40μs.四個點目標作正方形放置,間隔50米,左下角的點作為參考點.雷達與目標間隔1公里,觀察角Δθ=3.15,數據長度為128×128.采用FFT成像方法時,其縱向和橫向距離分辨率為ρr=ρa=1.123米,防止MTRC現象發生所需的目標最大范圍為[4]:縱向尺寸Dr<4ρ2r/λ=40米,橫向尺寸Da<4ρ2a/λ=40米.采用常規超分辨方法時,目標尺寸Dr=Da>10米則出現明顯的性能下降.圖2、圖3分別給出了RELAX方法及本文推廣的RELAX(Extended RELAX)算法的成像結果.可以看出,由于目標遠離參考中心,已在橫向和縱向出現距離走動,采用常規超分辨的RELAX算法產生圖像模糊,對于本文算法,則得到基本正確的成像結果.圖4和圖5則比較了RELAX算法和推廣的RELAX算法的散射點強度估計結果,可以看到,RELAX算法由于距離走動影響,散射點(除參考點以外)的強度降低.對于本文算法,散射點強度接近真實值. |
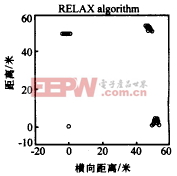
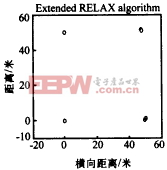
圖2 距離走動誤差下的RELAX成像結果 | 圖3 距離走動誤差下的 |

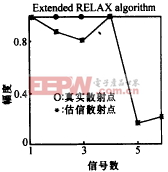
圖4 RELAX方法估計的信號強度推廣RELAX成像結果 | 圖5 推廣RELAX方法估計的信號強度 |
| 五、結束語 現有的雷達成像超分辨算法是基于目標回波信號的二維正弦信號模型,所以僅適用于目標位于參考點附近很小區域時的情形.當目標遠離參考點時,模型誤差,特別是距離走動誤差,將使算法性能嚴重下降或失效.為此,本文提出一種基于雷達成像近似二維模型的超分辨算法,從而擴大了超分辨算法的適用范圍.本文進一步的工作包括SAR實測數據成像及ISAR機動目標成像,結果將另文報道. 附 錄:參數估計的C-R界 y=vec(Y) (A.1) 式中vec(X)=(xT1,xT2,…,xTN)T,向量xn(n=1,2,…,N)為矩陣X的列向量.我們將式(5)改寫為如下向量形式:
式中 令:η=([Re(α)]T[Im(α)]TωT 式中ω=(ω1,ω2,…,ωK)T,μ=(μ1,μ2,…,μK)T, CRB(η)=[2Re(FHQ-1F)]-1 (A.8) |






評論