超高頻RFID讀寫器設計

3 讀寫器軟件設計
3.1 數(shù)字基帶處理模塊
數(shù)字基帶處理模塊是整個軟件設計的核心,它包括編解碼、數(shù)據(jù)分析、防碰撞等部分,數(shù)字基帶處理部分基本框圖如圖5所示。
3.2 讀寫器防碰撞流程
數(shù)字基帶處理部分中,防碰撞部分是重中之重,也是整個讀寫器設計的關鍵部分。此設計中采用隨機槽時隙仲裁防碰撞算法,解決了讀寫器在多標簽環(huán)境下無法識別標簽的問題,圖6為讀寫器防碰撞大體流程。
3.3 讀寫器PIE編碼設計
PIE(Pulse interval encoding)編碼,即脈沖間隔編碼,通過定義脈沖下降沿之間的不同時間寬度來表示數(shù)據(jù)。在標準中定義一個名稱為“Tari”的時間間隔,也成為基準時間間隔,該時間段為相鄰兩個脈沖下降沿的時間寬度,持續(xù)時間為25μs。此設計中數(shù)據(jù)0和1的PIE編碼與“Tari”時間按段的關系如表3所示。設計中使用定時器進行較精確的PIE編碼。
PIE編碼過程:首先設置編碼邏輯,即定時器中的值大于等于T時輸出為1,小于T時為輸出0,然后等待編碼信號來臨。在編碼信號來臨后,從FIFO中取數(shù)據(jù),如果為0,則設置定時器值為2T,時鐘每來一次做自減運算;數(shù)據(jù)為1時則設置定時器中的值為4T,時鐘每來一次做自減運算。
3.4 讀寫器解碼設計
FMO(Bi-Phase Space)解碼,即雙相間隔解碼,工作原理是在一個位窗內(nèi)采用電平變化來表示邏輯。如果電平只從位窗的起始處翻轉(zhuǎn),則表示邏輯“1”,如果電平除了在位窗的起始處翻轉(zhuǎn),還在位窗中間翻轉(zhuǎn)則表示邏輯“0”,如圖7所示。一個位窗的持續(xù)時間是25μs。
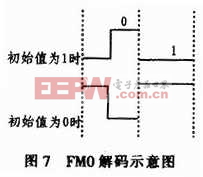
FMO解碼大體過程:首先讀寫器同時對I和Q兩路信號進行采樣,利用狀態(tài)機檢測返回幀頭的正確性,讀寫器根據(jù)幀頭的正確性來決定對I或Q路信號進行解碼。針對FMO編碼的特點可知,F(xiàn)MO每個數(shù)據(jù)單元的起始處發(fā)生翻轉(zhuǎn),由此可以根據(jù)起始處的上升沿或下降沿以及位窗中的采樣點來判斷出此位窗所表示的數(shù)據(jù)。設定一個位窗時間長度為T,一種情況是位窗起始處為下降沿,在該位窗3/4T處采樣,采樣為1則位窗表示數(shù)據(jù)“0”,采樣為0則位窗表示數(shù)據(jù)“1”;另一種情況是位窗起始處為上升沿,在該位窗3/4T處采樣,采樣為1則位窗表示數(shù)據(jù)“1”,采樣為0則位窗表示數(shù)據(jù)“0”。
4 結(jié)束語
本文中設計主芯片采用LPC2103與Si4031,硬件電路簡單易于實現(xiàn);基于ISO/IEC 18000-6C,利用防碰撞算法設計實現(xiàn)了UHF頻段讀寫器在多標簽環(huán)境下順利與標簽進行通信,增強了讀寫器的讀寫性能;最后通過簡單分析,介紹了PIE編碼和FMO解碼的過程。






評論