解析車載自組網的發展與應用情況

4.2.3 CSM CA和RR—AL OHA 的比較
對于常見自組網一般采用兩種類型的MAC協議:一種是基于CSMMCA的異步競爭式MAC協議,另一種是基于時隙的同步預約式MAC協議。
不過對于車載自組網的特殊性,預約式的同步MAC協議效果可能更好些。表2對CSMA/CA 和RR—ALOHA 這兩種MAC協議進行了簡單的比較。
這兩種MAC協議各有利弊,通過進一步分析,似乎RR—AL OHA更適合于在車載自組網中使用,但是在RR—ALOHA中不能忽視的一點是,節點通信范圍內的鄰居節點數不能超過1幀中的時隙數。

4.2.4 令牌環
除了基于CSMA/CA和時隙類的MAC協議外,還有一些其他類型的MAC協議,如令牌環。在具備GPS系統的車輛問可以使用基于非競爭性的令牌環接入方式(如WTRP協議),以提高信道利用率,避免信道沖突,更能滿足車輛間安全預警通信的時延要求。在車載自組網中應用令牌環的主要思想:在廣播信道上通過令牌組成邏輯環來控制信道的接入,為表述方便,稱本車輛(對應通信網絡中的本地節點)為TS(this station);前一車輛(對應通信網絡中的上一節點)為PS(previous station);后續車輛(對應通信網絡中的后續節點)稱為NS(next smtion)。考慮實際車輛隊列中,設車輛A,B,C構成隊列,隊列內采用無線令牌環協議,三輛車組成邏輯令牌環,令牌傳遞順序為A—B—C—A。設某一時刻B為令牌擁有者,令B為TS,相應的A為PS,C為NS。網絡結構示意如圖6所示,圖中箭頭方向表示令牌傳遞方向,當車輛持有令牌后才能開始進行數據的發送,而那些沒有持有令牌的車輛只能進行數據的接受。當傳送完一定的數據后,令牌擁有者把令牌傳遞給后續車輛,開始下一輛車的數據傳送。

5 路由協議
由于車載網絡拓撲的頻繁變化,節點移動速度很快,路由技術成為了車載自組網中的重大挑戰之一。在早期實驗平臺中使用的是一些簡單洪泛路由技術。目前,在車載自組網中使用的路由協議大致可以分為3 類:
① 基于拓撲的路由(TBR,topology—based routing)協議;
②基于位置的路(PBR,position—based routing,)協議;
③基于地圖的路(MBR,map—based routing)協議,如圖7所示。

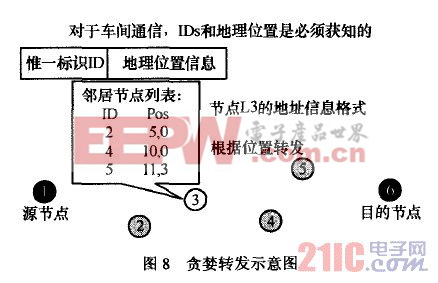
GPSR(greedy perimeter state—less Routing)是比較有名的利用地理位置來優化路由協議,基本思想是:節點在發送數據前不尋找路由,不保存路由表。移動節點直接根據位置信息(包括自己的、鄰節點的以及目的節點的位置信息)制定數據轉發決策。數據分組中通常攜帶目的節點的地理位置信息。網絡中相鄰節點問通過周期性廣播分組獲得其他節點的位置信息。源節點或中間節點根據這些位置信息,將數據分組傳送給一個或多個相對自己而言距離目的節點更近的鄰節點,如圖8所示。GPSR在高速公路上性能不錯,但是在城市環境中存在著缺陷。
空間感知路由協議SAR(spatialaware routing)是針對路由空洞障礙的進一步改進,也可以說是在GPSR路由協議的基礎上的進一步改進,基本思想是:建立一個網路節點組成的空問模型圖,模型圖中的點表示車輛網絡中的一些重要連接點(車輛、路邊設施等),邊表示連接點之問的連接。圖中的點是根據GIS中有用信息午提取出來,最后通過編寫一個地理數據文件(geographic data files)語法分析器,從空間模型圖中提取道路的相關信息。把源節點和目的節點的位置映射到空問模型中,然后利用圖論中的最短路經算法來計算源到目的節點的路徑。但是空間感知路由協議SAR存在一個缺點,空間模型建立是否準確,決定了路徑上是否有合適的轉發節點。
通過表3,對車載自組網中使用的路由技術進行一個橫向比較:

6 結語
隨著人們對個人通信要求的提高,人們越來越希望有一種更安全、高效率的方式移動到目的地,車載自組網將會是未來的重點發展方向,其中MAC層和路由層的設計將是車載自組網所面臨的最重大挑戰,MAC層需要解決的問題有無線信道劃分、分配和能力控制,向網絡層提供統一的服務,屏蔽物理層不同的信道控制方式,實現擁塞控制、優先級排隊、分組發送、確認、差錯控制和流量控制等;路由層的側重點在于如何建立完全分布式的、適合高速拓撲變化車載網絡的路由協議。最終整個車載自組網的目標是制定一個通信標準協議,使不同廠商的車輛之間都能實現自由通信。








評論