一種GPS的智能移動終端的應用

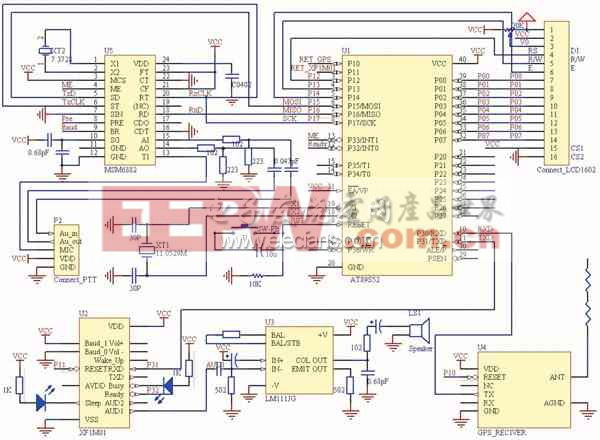
圖4 終端MCU控制時序分配
如圖4所示,在1秒時隙內,先接收GPS信號(圖中GPS表示),經采集后再發送給調制芯片(圖中Send_data),然后控制LCD顯示(圖中LCD),顯示完畢后開始等待接收總臺命令信號,等待直至下一秒的到來,相隔大約0.6秒。若下一秒到來前沒有命令信號則轉入下一個循環;若下一秒到來前有接收到命令信號則進入接收程序(圖中Receive_data),經過短暫的數據處理時間段(圖中process)后再啟動顯示(圖中LCD2),然后驅動語言芯片發音(圖中Speak)。成功收到命令信息后,下一周期的“Send_data”將改變前導碼以反饋給總臺。
硬件電路設計
MCU
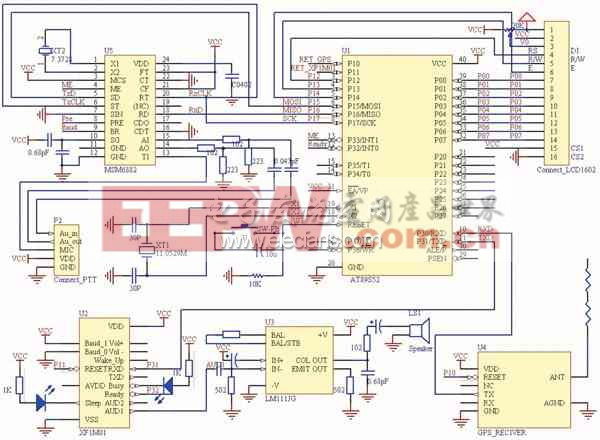
本設計采用AT89S52作為MCU,其中P0口與P1口的2,3,4控制LCD1602;P1口的5,6,7作為同步串口控制調制解調芯片MSM6882;串口的RX接收GPS數據,TX發送語音數據(見圖5)。
設計了一個嵌入式智能移動定位終端,經過實物調試成功。巧妙利用低成本硬件實現了GPS的信號采集、處理、傳輸等的功能。設計通過低成本的設備改良制作出了智能移動終端,實現總臺對保安位置等信息的掌握,監控。本設計巧妙地運用原有對講機網絡作為數字通信媒介,使得成本更低應用更方便。另外語音合成文本芯片的運用簡化了硬件的開發。












評論