基于AT89C2051和InRF401的無線監測系統

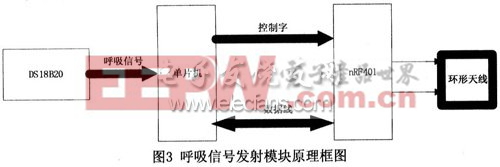
2.2 呼吸信號的的發射部分
本文引用地址:http://www.104case.com/article/155807.htm采用的nRF401是一個433MHZ ISM頻段設計的真正單片UHF無線收發芯片,它采用FSK調制解調技術,nRF401最高工作頻率可以達到20k,發射功率可以調整,最大發射功率為+10dBm。利用單片機對發射部分進行設置,通過發射模塊將承載呼吸信號的數字信號發射出去,其原理框圖如圖3所示。
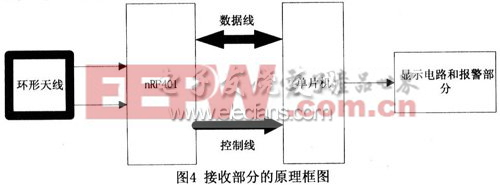
2.3 接收部分和單片機的處理
無線接收模塊收到發射機發來的信號后,將其傳送到另一單片機上進行信號的處理,對呼吸暫停持續時間進行定時測定,當呼吸暫停超過10s時計數,將結果利用數碼管進行動態顯示,從而實現監測呼吸暫停次數的目的。如圖4所示。
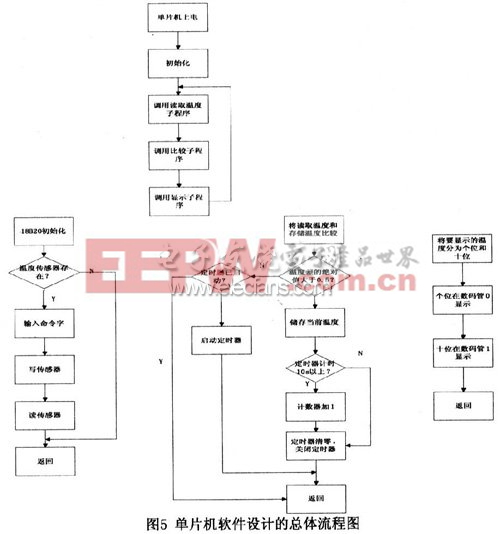
2.4 對于單片機的軟件設計
本系統的工作主要是利用單片機來進行控制,包括呼吸信號的提取,無線收發模塊的傳輸協議和收發方式的設置,以及顯示和報警部分,都是利用單片機來進行的,其總體的程序設計流程圖如圖5所示。
2.4.1對于DSl8B20的軟件設計
雖然數字傳感器的硬件接法比較簡單,但在測量溫度時有嚴格的時序要求。一旦時序出現錯誤,那么溫度的讀取和顯示就不能正確進行,在編寫程序時這個問題需要著重考慮,例如我們采用中斷時,就要考慮中斷的執行對于單片機工作整個時序的影響。DSl8B20的一線工作協議流程是:初始化→ROM操作指令→存儲器操作指令→數據傳輸。其工作時序包括初始化時序、寫時序和讀時序。寄存器R1、R0決定溫度轉換的精度位數:R1RO=“00”,9位精度,最大轉換時間為93.75ms;RlR0=“01”,10位精度,最大轉換時間為187.5ms;R1R0=“10”,11位精度,最大轉換時間為375ms;R1R0=“1l”,12位精度,最大轉換時間為750ms;未編程時默認為12位精度。我們采用器件默認的12位轉化。








評論