基于DDS的單脈沖體制雷達目標模擬的實現

1.3 數字波束交匯
當DSP收到開始工作的命令后,模擬目標按照建立的航跡飛行,并與送來的雷達波束進行實時交匯。波束交匯示意圖如圖3所示。本文引用地址:http://www.104case.com/article/155287.htm
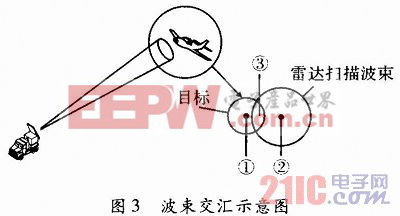
圖3中,①為目標中心位置;②為雷達掃描波束中心位置;③為目標與波束交匯公共區域。當雷達掃描波束與目標交匯成功以后,可以根據式(1)計算目標的幅度

其中,(sinA,sinE)為目標方位和高低角的正弦;(sinAt,sinEt)為雷達波束方位和高低角的正弦,(sinθA0.5,sinθE0.5)為半功率波束方位和高低角的正弦,N為目標幅度量化值。
1.4 和差波束幅度的實現
如上所述,當目標與掃描波束交匯成功,通過公式計算圖3中③的區域目標的幅度,該幅度即為和波束的幅度。然后根據公式計算出目標中心位置①與掃描波束中心位置②之間的角度偏差
△φ=arcsin(sinAt)-arcsin(sinA) (2)
式中,△φ為目標中心位置與掃描波束中心位置之間的角度偏差;sinA為目標方位角的正弦;sinAt為雷達波束方位角的正弦。
再根據目標①與雷達掃描波束②之間的角度差,運用單脈沖測角差斜率反算出差波束幅度
F(△)=Km·F(∑)·△φ·md (3)
式中,F(△)為波束交匯差幅度;F(∑)為波束交匯和幅度;Km為單脈沖測角差斜率;md為修正因子。
1.5標差波束的正負號的實現
AD9857作為一款窄帶正交數字上變頻器件,基本滿足一般雷達的中頻信號要求。但該芯片在上電初始化時無法設置波形輸出的初始相位,以及多個芯片同時工作時,芯片之間沒有相位同步信號,每次上電后各自的初始相位不同。這給正確模擬差波束相對于和波束的相位關系帶來了困難。
為正確模擬差波束相對于和波束的相位關系,主要采取兩種措施:
(1)兩路DDS芯片上電后,由外部系統通過外部通訊接口發送校準工作命令,當DSP芯片收到該命令后,置DDS芯片為中頻連續波模式輸出中頻連續波給信號處理器進行校準,把兩路芯片的相位校準在一起。
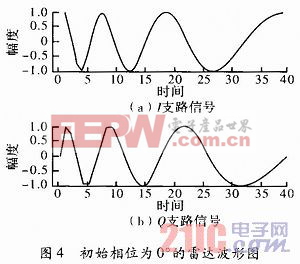
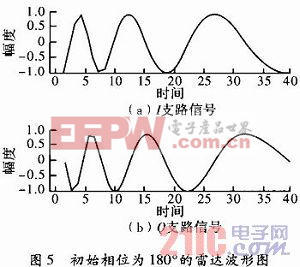
(2)通過步驟(1)的方法可以去除兩路芯片之間的相位差。為正確表示差波束相對于和波束的相位關系,通過在原始雷達信號上加一個初始相位的方法來實現,當正號時設為初始相位為0°,當負號時設置為初始相位為180°。設雷達基帶信號為
![]()
式中,A為信號的幅度;φ(t)為雷達基帶信號波形相位;θ0為雷達基帶信號波形初始相位。
用Matlab進行仿真,仿真結果如圖4和圖5所示。




評論