由于根據公式計算得到的方位角理論值是以真北為標準的,而方位角傳感器的采集值是以磁北為標準的,因此采集值和理論值之間存在一個差值,即磁偏角。計算出的對星參數理論值需要根據磁偏角進行修正。根據IGRF2005地磁場模型,利用NOAA的NG-DC提供的磁偏角計算程序,用磁偏角對方位角進行修正。
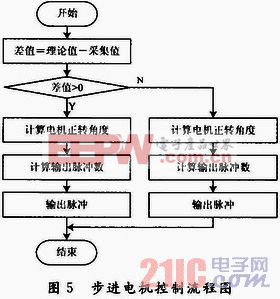
便攜站天線當前的方位角和俯仰角可以通過傳感器直接采集到,然后將采集到的數據與修正過的理論值進行比較,決定步進電機的轉動方向和大小,當步進電機按程序轉動完成后,再次采集數據,重復上述步驟,直到采集值等于修正后的理論值為止。步進電機控制流程如圖5所示。








評論