ADC驅動器或差分放大器設計匯總

本文引用地址:http://www.104case.com/article/154258.htm
因為兩個放大器輸入端之間的電壓被負反饋驅動到零,因此兩個輸入端處于連接狀態,差分輸入阻抗RIN就簡單地等于2×RG。為了匹配傳輸線阻抗RL,需要將由公式11計算得到的電阻RT跨接在差分輸入端。圖3給出了典型的電阻值,其中RF =RG=200Ω,理想的RL, dm=100Ω,RT=133Ω。
 | (11) |
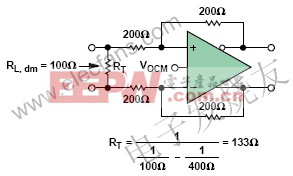
圖3:匹配100Ω傳輸線。
單端輸入的端接更加麻煩。圖4描述了采用單端輸入和差分輸出的ADC驅動器工作原理。
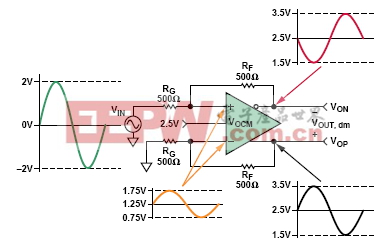
雖然輸入是單端的,但VIN, dm等于VIN。因為電阻RF和RG是相等和平衡的,因此增益是1,而且差分輸出VOP–VON等于輸入,即4Vp-p。VOUT, cm=VOCM=2.5V,而且從下方的反饋電路可以看出,輸入電壓VA+和VA-等于VOP/2。
根據公式3和公式4,VOP=VOCM+VIN/2,即2.5V±1V的同相擺幅;VON=VOCM–VIN/2,即2.5V±1V的反相擺幅。這樣,VA+和VA-的擺幅等于1.25V±0.5V。必須由VIN提供的電流交流分量等于(2V–0.5V)/500Ω=3mA,因此到地的電阻必須匹配,從VIN看過去為667Ω。
當每個環路的反饋系數都匹配時,公式12就是計算這個單端輸入電阻的通式,其中RIN, se是單端輸入電阻。
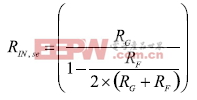 | (12) |
這是計算終結電阻的出發點。然而值得注意的是,放大器增益公式基于零阻抗輸入源的假設。由于存在單端輸入造成的不平衡而必須加以匹配的重要源阻抗只會增加上面RG的阻值。為了保持平衡,必須增加下面RG的阻值來實現匹配,但這會影響增益值。雖然可以為解決端接單端信號問題而采用一個封閉形式的解決方案,但一般使用迭代的方法。在下面的例子中這種需求將變得很明顯。
在圖5中,為了保持低的噪聲,要求單端到差分增益為1,輸入終結電阻為50Ω,反饋和增益電阻值在200Ω左右。
根據公式12可以算出單端輸入電阻為267Ω。公式13表明,并聯電阻RT應等于61.5Ω,才能將267Ω輸入電阻減小至50Ω。
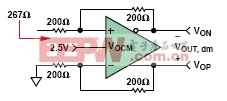
圖5:單端輸入阻抗。
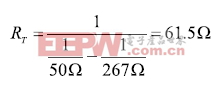 | (13) |
圖6是帶源電阻和終端電阻的電路。帶50Ω源電阻的源開路電壓為2Vp-p。當源用50Ω端接時,輸入電壓減小到1Vp-p,這個電壓也是單位增益驅動器的差分輸出電壓。
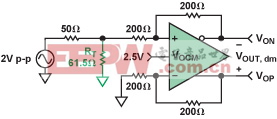
圖6:帶源電阻和終端電阻的單端電路。
這個電路初看起來非常完整,但不匹配的61.5Ω電阻與50Ω的并聯并增加到了上面的RG電阻,這就改變了增益和單端輸入電阻,并且造成反饋系數失配。在低增益情況下,輸入電阻的變化很小,暫時可以忽略,但反饋系數仍然必須匹配。解決這個問題的最簡單方法是增加下面RG的阻值。圖7是一種Thévenin等效電路,其中上方的并聯組合用作源電阻。
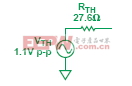
圖7:輸入源的Thévenin等效電路。
有了這種替代方案后,就可以將27.6Ω的電阻RTS增加到下面的環路中實現環路反饋系數的匹配,如圖8所示。
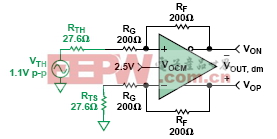
圖8:平衡的單端端接電路。
注意,1.1Vp-p的Thévenin電壓要大于1Vp-p的正確端接電壓,而每個增益電阻增加了27.6Ω,降低了閉環增益。對于大電阻(>1kΩ)和低增益(1或2)來說這些相反的效應基本抵消,但對于小電阻或較高增益來說并不能完全抵消。圖8所示電路現在分析起來就很容易了,其中的差分輸出電壓可以用公式14計算。
 | (14) |
差分輸出電壓并不完全等于理想的1Vp-p ,但可以通過修改反饋電阻實現最終獨立的增益調整,如公式15所示。
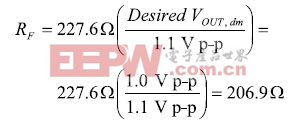 | (15) |
圖9是用標準1%精度電阻實現的完整電路。
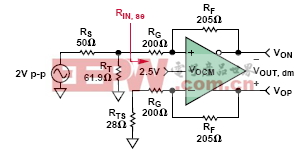
圖9:完整的單端端接電路。
觀察: 參考圖9,驅動器的單端輸入電阻RIN, se由于RF和RG的改變而變化。驅動器上端環路的增益電阻是200Ω,下端環路的電阻是200Ω+28Ω=228Ω。在不同增益電阻值的情況下計算RIN, se首先要求計算兩個β值,見公式16和公式17。
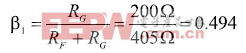 | (16) |
| (17) |
輸入電阻RIN, se的計算見公式18。
 | (18) |
這個值與原來計算的267Ω稍有不同,但對RT的計算沒有顯著的影響,因為RIN, se與RT是并聯的關系。
如果需要更精確的總體增益,可以使用更高精度或串聯的可調電阻。
上述描述的單次迭代方法非常適合閉環增益為1或2的場合。增益越高,RTS的值越接近RG值,用公式18計算的RIN, se值與用公式12計算的RIN, se值之間的差異就越大。在這些情況下要求采用多次迭代。
多次迭代并不難實現:最近ADI公司發布的可下載的差分放大器計算工具, ADIsimDiffAmp™(參考文獻2)和 ADI Diff Amp Calculator™(參考文獻3)足以擔當此任,它們能在幾秒內完成上述計算。
輸入共模電壓范圍
輸入共模電壓范圍(ICMVR)規定了正常工作狀態下可以施加于差分放大器輸入端的電壓范圍。在這些輸入端上呈現的電壓可以被稱為ICMV、Vacm或VA±。這個ICMVR指標經常被誤解。最常遇到的難題是確定差分放大器輸入端的實際電壓,特別是相對于輸入電壓而言。知道變量VIN, cm、β和VOCM的值后,當β不相等時使用通式19、當β相等時使用簡化公式20就可以計算出放大器的輸入電壓(VA±)。
 | (19) |
 | (20) |
記住VA始終是按比例縮小的輸入信號,這一點非常有用(見圖4)。不同的放大器類型有不同的輸入共模電壓范圍。ADI公司的高速差分ADC驅動器有兩種輸入級配置,即中心型和偏移型。中心型ADC驅動器的輸入電壓離每個電壓軌有約1V的距離(因此叫中心型)。而偏移型輸入級增加了兩個晶體管,允許輸入端電壓擺幅更接近–VS軌。圖10是一個典型差分放大器(Q2和Q3)的簡化輸入原理圖。
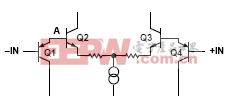
圖10:具有偏移型ICMVR的簡化差分放大器。
偏移型輸入架構允許差分放大器處理雙極性輸入信號,即使放大器是采用單電源供電,因此這種架構非常適合輸入是地或地電平以下的單電源應用。在輸入端增加的PNP晶體管(Q1和Q4)可以將差分對的輸入電壓向上偏移一個晶體管的Vbe電壓。例如,當-IN端電壓為-0.3V時,A點電壓將為0.7V,允許差分對正常工作。沒有PNP(中心型輸入級)時,A點的-0.3V電壓將使NPN差分對處于反向偏置狀態,因而無法正常工作。
表1提供了ADI公司ADC驅動器的多數指標一覽表。對這張表粗略一看就能發現哪些驅動器具有偏移型ICMVR,哪些沒有。
輸入和輸出耦合:交流或直流
需要交流耦合還是直流耦合對差分ADC驅動器的選擇有很大的影響。輸入和輸出耦合之間的考慮因素也不同。
交流耦合型輸入級電路見圖11。
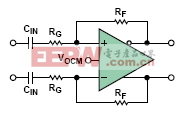
圖11:交流耦合型ADC驅動器。
對于采用交流耦合輸入的差分至差分應用來說,放大器輸入端呈現的直流共模電壓等于直流輸出共模電壓,因為直流反饋電流被輸入電容隔離了。另外,直流反饋系數也是匹配的,完全等于單位1。VOCM——和由此得到的直流輸入共模電壓——經常被設置在電源電壓的一半左右。具有中心型輸入共模范圍的ADC驅動器非常適合這類應用,它們的輸入共模電壓接近規定范圍的中心。
交流耦合單端至差分應用與對應的差分輸入應用非常相似,但在放大器輸入端具有共模紋波——按比例縮小的輸入信號“復制品”。具有中心型輸入共模范圍的ADC驅動器將平均輸入共模電壓設定在規定范圍的中間,因而能為大多數應用中的紋波提供足夠的富余度。
當輸入耦合方式可選時,值得人們注意的是,采用交流耦合輸入的ADC驅動器比采用直流耦合輸入的相似驅動器耗散更少的功率,因為兩個反饋環路中都不存在直流共模電流。
當ADC要求輸入共模電壓與驅動器輸出端電壓完全不同時,交流耦合ADC驅動器的輸出就非常有用。當VOCM值被設在電源電壓一半附近時,驅動器將有最大的輸出擺幅,但當驅動要求非常低輸入共模電壓的低電壓ADC時會出現問題。走出這個困境的簡單方法(圖12)是驅動器輸出和ADC輸入之間采用交流耦合連接,從驅動器輸出中去除ADC的直流共模電壓,并允許適合ADC的共模電平應用于交流耦合側。例如,驅動器可以工作在單5V電源和VOCM=2.5V條件下,而ADC可以工作在單1.8V電源,此時在標記為ADC CMV的點必需施加0.9V的輸入共模電壓。
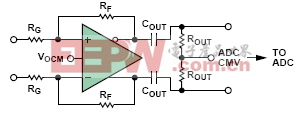
圖12:采用交流耦合輸出的直流耦合輸入電路。

模數轉換器相關文章:模數轉換器工作原理











評論