ADC驅動器或差分放大器設計匯總

作為應用工程師,我們經常遇到各種有關差分輸入型高速模數轉換器(ADC)的驅動問題。事實上,選擇正確的ADC驅動器和配置極具挑戰性。為了使魯棒性ADC電路設計多少容易些,我們匯編了一套通用“路障”及解決方案。本文假設實際驅動ADC的電路——也被稱為ADC驅動器或差分放大器——能夠處理高速信號。
本文引用地址:http://www.104case.com/article/154258.htm引言
大多數現代高性能ADC使用差分輸入抑制共模噪聲和干擾。由于采用了平衡的信號處理方式,這種方法能將動態范圍提高2倍,進而改善系統總體性能。雖然差分輸入型ADC也能接受單端輸入信號,但只有在輸入差分信號時才能獲得最佳ADC性能。ADC驅動器專門設計用于提供這種差分信號的電路——可以完成許多重要的功能,包括幅度調整、單端到差分轉換、緩沖、共模偏置調整和濾波等。自從推出AD8138,1以后,差分ADC驅動器已經成為數據采集系統中不可或缺的信號調理元件。
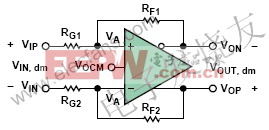
圖1:差分放大器。
圖1是一種基本的完全差分電壓反饋型ADC驅動器。這個圖與傳統運放的反饋電路有兩點區別:差分ADC驅動器有一個額外的輸出端(VON)和一個額外的輸入端(VOCM)。當驅動器與差分輸入型ADC連接時,這些輸入輸出端可以提供很大的靈活性。
與單端輸出相反,差分ADC驅動器產生平衡的差分輸出信號——相對于VOCM——在VOP與VON之間。這里的P指的是正,N指的是負。VOCM輸入信號控制輸出共模電壓。只要輸入與輸出信號處于規定范圍內,輸出共模電壓必定等于VOCM輸入端的電壓。負反饋和高開環增益致使放大器輸入端的電壓VA+和VA-實質上相等。
為了便于后面的討論,需要明確一些定義。如果輸入信號是平衡信號,那么VIP和VIN相對于某個公共參考電壓的幅度應該是相等的,相位則相反。當輸入信號是單端信號時,一個輸入端是固定電壓,另一個輸入端的電壓相對這個輸入端變化。無論是哪種情況,輸入信號都被定義為VIP–VIN。
差模輸入電壓VIN, dm和共模輸入電壓VIN, cm的定義見公式1和公式2。
 | (1, 2) |
雖然這個共模電壓的定義應用于平衡輸入時很直觀,但對單端輸入同樣有效。輸出也有差模和共模兩種,其定義見公式3和公式4。
對差分ADC驅動器的分析比對傳統運放的分析要復雜得多。為了簡化代數表達式,暫且定義兩個反饋系數β1和β2,見公式5和公式6。
 | (5, 6) |
在大多數ADC驅動應用中β1= β2,但含有VIP、VIN、VOCM、β1和β2項的VOUT, dm通用閉環公式對于了解β失配對性能的影響非常有用。VOUT, dm的計算見公式7,其中包括了與頻率相關的放大器有限開環電壓增益A(s)。
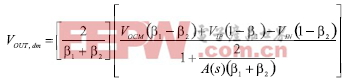 | (7) |
當β1 ≠β2時,差分輸出電壓取決于VOCM——這不是理想的結果,因為它產生了偏移,并且在差分輸出中有過大的噪聲。電壓反饋架構的增益帶寬積是常數。有趣的是,增益帶寬積中的增益是兩個反饋系數平均值的倒數。當β1 =β2 ≡β時,公式7可以被簡化為公式8。
|
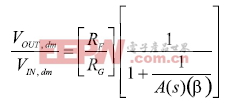
這個表達式大家可能更加熟悉。當A(s) → ∞時,理想的閉環增益可以簡化為RF/RG。增益帶寬乘積公式看起來也很熟悉,其中的“噪聲增益”與傳統運放一樣,等于1/β。
反饋系數匹配的差分ADC驅動器的理想閉環增益見公式9。
 | (9) |
輸出平衡是差分ADC驅動器的一個重要性能指標,它分兩個方面:幅度平衡和相位平衡。幅度平衡用于衡量兩個輸出在幅度方面的接近程度,對于理想放大器來說它們是完全一致的。輸出相位平衡用于衡量兩個輸出的相位差與180°的接近程度。輸出幅度或相位的任何失衡都會在輸出信號中產生有害的共模分量。輸出平衡誤差(公式10)是差分輸入信號產生的輸出共模電壓與相同輸入信號產生的輸出差模電壓的對數比值,單位是dB。
 | (10) |
內部共模反饋環路迫使VOUT, cm等于輸入端VOCM的電壓,從而達到完美的輸出平衡。
將輸入端接到ADC驅動器
處理高速信號的系統經常會用到ADC驅動器。分隔距離超過信號波長一小段的器件之間必須用具有受控阻抗的電氣傳輸線連接,以避免破壞信號完整性。當傳輸線的兩端用其特征阻抗端接時可以取得最佳性能。驅動器一般放在靠近ADC的地方,因此在它們之間不要求使用受控阻抗連接。但到ADC驅動器輸入端的引入信號連接通常很長,必須采用正確電阻端接的受控阻抗連接。
不管是差分還是單端,ADC驅動器的輸入阻抗必須大于或等于理想的終端電阻值,以便添加的終端電阻RT能與放大器輸入端并聯達到要求的電阻值。本文討論的例子中的所有ADC驅動器都設計成具有平衡的反饋比,如圖2所示。
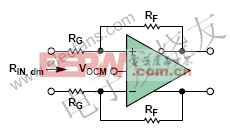
圖2:差分放大器的輸入阻抗。

模數轉換器相關文章:模數轉換器工作原理











評論