CAN總線協(xié)議到EtherCAT從站協(xié)議的轉(zhuǎn)換網(wǎng)關(guān)設(shè)計

摘要:本文通過對實時工業(yè)以太網(wǎng)通信協(xié)議EtherCAT的研究,設(shè)計了CAN總線主站協(xié)議轉(zhuǎn)換為EtherCAT從站協(xié)議的通信協(xié)議轉(zhuǎn)換網(wǎng)關(guān)設(shè)備,解決了工業(yè)自動化現(xiàn)場CAN總線通信設(shè)備與EtherCAT主站控制系統(tǒng)的互連問題,從而保證現(xiàn)場總線設(shè)備數(shù)據(jù)更加高效、快速地傳遞到中央監(jiān)控系統(tǒng)。
關(guān)鍵詞:EtherCAT從站;CAN總線;網(wǎng)關(guān);協(xié)議轉(zhuǎn)換
引言
隨著工業(yè)自動化的發(fā)展,大量現(xiàn)場設(shè)備的信息傳遞不再采用模擬信號電纜傳送,而是替換為智能化現(xiàn)場設(shè)備,通過通信方式傳遞設(shè)備的狀態(tài)和控制信息。在這個過程中,現(xiàn)場總線設(shè)備得到了大量的應(yīng)用。而現(xiàn)場總線設(shè)備的多樣性,導(dǎo)致在一個大型的自動化控制系統(tǒng)中設(shè)備的通信協(xié)議不同、通信速率不同、網(wǎng)絡(luò)拓撲形式不同,給中央監(jiān)控系統(tǒng)和這些現(xiàn)場設(shè)備之間的信息交互帶來困擾。
為了更好地解決控制系統(tǒng)內(nèi)自動化數(shù)據(jù)傳輸及互連的問題,部分國際自動化系統(tǒng)廠家借助以太網(wǎng)現(xiàn)有協(xié)議框架及其100M的帶寬資源,在現(xiàn)有的以太網(wǎng)協(xié)議上進行相應(yīng)的修改,推出了不同的實時工業(yè)以太網(wǎng)技術(shù),比較流行的有EtherCAT、Sercos III、Profinet、Powerlink、Ethernet/IP等。其中,EtherCAT(Ethernet for Control Automation Technology)是開放的實時工業(yè)以太網(wǎng)通信協(xié)議,最初由德國倍福自動化有限公司研發(fā)。它基于標準的以太網(wǎng)技術(shù),支持多種設(shè)備連接拓撲結(jié)構(gòu),具有配置簡單、有效數(shù)據(jù)率高、全雙工、數(shù)據(jù)傳輸容量大、傳輸速度快、時鐘同步性高、成本低、開放性好等特點,是一種用于工業(yè)自動化的實時、高速以太網(wǎng)通信協(xié)議。EtherCAT協(xié)議使用全雙工100 Mbps以太網(wǎng),系統(tǒng)由一個通信主站和若干從站通信節(jié)點組成,主站發(fā)送以太網(wǎng)幀給各從站,從站從數(shù)據(jù)幀中抽取數(shù)據(jù)或?qū)?shù)據(jù)插入數(shù)據(jù)幀。主站使用標準的以太網(wǎng)控制器,協(xié)議和驅(qū)動程序由軟件實現(xiàn),從站通信節(jié)點使用專門的EtherCAT從站控制器。
本文設(shè)計了CAN總線主站協(xié)議轉(zhuǎn)換為EtherCAT從站協(xié)議的協(xié)議轉(zhuǎn)換網(wǎng)關(guān)設(shè)備(以下簡稱CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)),實現(xiàn)了工業(yè)自動化現(xiàn)場CAN總線通信設(shè)備與EtherCAT主站控制系統(tǒng)的互連通信。
1 系統(tǒng)總體網(wǎng)絡(luò)架構(gòu)
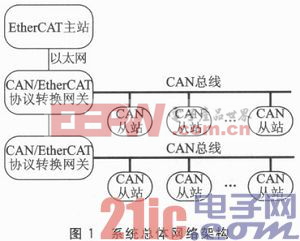
CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)存在兩個方向的外部接口,對上通過以太網(wǎng)與EtherCAT主站進行數(shù)據(jù)交換,通信協(xié)議符合EtherCAT實時工業(yè)以太網(wǎng)技術(shù)規(guī)范要求;對下與CAN總線從站設(shè)備實現(xiàn)通信,包括實時數(shù)據(jù)通信、故障診斷恢復(fù)和冗余切換處理等。系統(tǒng)總體的網(wǎng)絡(luò)架構(gòu)如圖1所示。
2 CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)
2.1 CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)核心器件選型
CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)硬件包括EtherCAT從站協(xié)議控制器、從站MCU、CAN總線協(xié)議控制器等。EtherCAT協(xié)議控制器實現(xiàn)EtherCAT的物理層與數(shù)據(jù)鏈路層的協(xié)議。從站MCU主要負責(zé)運行用戶的應(yīng)用程序,實現(xiàn)EtherCAT和CAN總線協(xié)議之間的協(xié)議及數(shù)據(jù)轉(zhuǎn)換。CAN總線協(xié)議控制器實現(xiàn)CAN總線的物理層與數(shù)據(jù)鏈路層的協(xié)議。
現(xiàn)在市場上有多種EtherCAT協(xié)議控制器可供使用,如Beckhoff公司的ASIC芯片ET1100、ET1200,德國Hilscher公司的ComX—CA—RE模塊,也可以使用IP—Core將EtherCAT通信功能集成到設(shè)備控制FPGA中。ET1200是簡化版,只提供1個RJ45接口,不能滿足開發(fā)需求。ComX模塊提供了方便易用的接口,可以簡化硬件設(shè)計,但是價格較高。FPGA可提供針對Altera和Xilinx公司的IP核,但是價格高,開發(fā)難度大。
考慮到實際應(yīng)用中,開發(fā)成本及軟硬件設(shè)計的實現(xiàn)復(fù)雜度,EtherCAT從站協(xié)議控制器選用ET1100。ET1100是一款強大的EtherCAT從站控制器ESC專用芯片,具有豐富的接口資源。它具有4個數(shù)據(jù)收發(fā)端口、8個FMMU單元、8個SM、4 KB控制寄存器、8 KB過程數(shù)據(jù)存儲器、支持64位的分布時鐘。
從站MCU選用LPC2292芯片。LPC2292是一款基于16/32位ARM7TDMI—S核,支持實時仿真和跟蹤的MCU。LPC2292自帶2路高級CAN總線通道,可節(jié)省設(shè)計成本。
2.2 CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)硬件設(shè)計
CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)主要由通信控制回路、Ethernet回路、CAN總線回路3部分電路構(gòu)成。CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)硬件框圖如圖2所示。
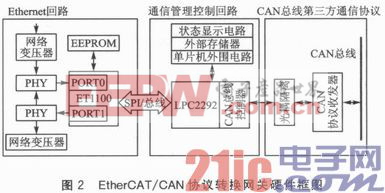
在EtherCAT回路中,EtherCAT協(xié)議控制器ET1100可選擇使用SPI或8位、16位總線與LPC2292連接。ET1100的相關(guān)信息保存在EEPROM中。數(shù)據(jù)收發(fā)端口使用PORT0和PORT1,采用MII方式連接PHY芯片,經(jīng)過網(wǎng)絡(luò)變壓器隔離,通過RJ45接口與主站或其他從站連接。
通信管理控制回路由MCU(LPC2292)、狀態(tài)顯示電路、外部存儲器及單片機外圍電路構(gòu)成。CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)的配置信息、通信數(shù)據(jù)使用256 KB外部RAM或F-RAM存儲,可以顯示運行狀態(tài)和通信狀態(tài)等信息。
CAN總線第3方通信協(xié)議中,使用LPC2292的內(nèi)置CAN總線控制器,可根據(jù)需要使用1路或2路CAN總線。為了提高CAN/EtherCAT協(xié)議轉(zhuǎn)換網(wǎng)關(guān)的電磁兼容性EMC,使用高速光耦對CAN總線通信信號進行隔離。

光耦相關(guān)文章:光耦原理




評論