基于ARM9和Linux的機器人控制系統設計

現有智能機器人用直流電機作為驅動輪時一般都是用單片機或者高速的DSP等進行控制,而且同一機器人往往需用多個CPU來實現各自的功能,但隨著對機器人的智能化要求越來越高,需要一種新的控制器(使用一個處理器)來滿足機器人的各種行為要求,例如視頻采集、無線通信。本文介紹的利用ARM實現的智能機器人平臺,為智能機器人的開發提供了一個新方法。平臺采用的ARM9是基于三星公司的S3C2410處理器,主頻高達200 MHz,支持藍牙、觸摸屏以及USBHOST接口,可以傳輸高速圖像。嵌入式Linux系統是一個多用戶操作系統,它允許多個用戶同時訪問系統而不會造成用戶之間的相互干擾。另外,Linux系統還支持真正的多用戶編程,一個用戶可以創建多個進程,并使各個進程協同工作來滿足用戶的需求。Linux的引入使其他智能模塊都以設備的形式存在,只有在用戶需要的時候才調用相關設備驅動從而使數據融合更方便,運行多任務也更穩定。
利用ARM和嵌人式Linux作為智能機器人平臺具有很大的優勢,但在國內還未發現用該平臺開發智能機器人的系統。本設計完成了對該系統驅動的初步編寫,并通過實際驗證,取得了良好效果。
1 驅動電路及測速方法
1.1 總體結構及驅動電路
系統的整體結構框圖如圖l所示。
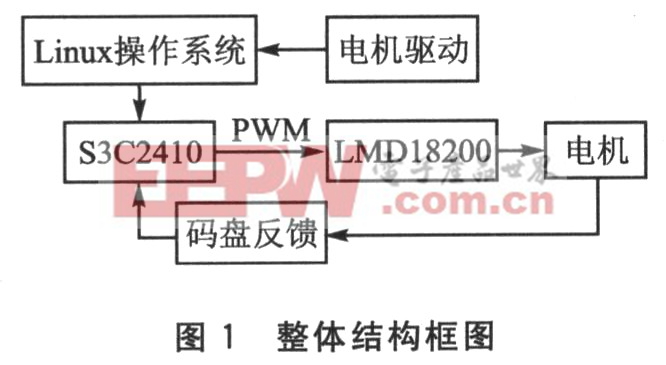
本設計采用的LMD18200的真值表如表1所列。通過ARM的I/0口(例如D口的DO~3)來控制電機的工作狀態。

1.2 測速方法
ARM沒有捕獲外部脈沖的計數器,它的定時器是用來計算內部脈沖的。碼盤輸出信號接外部中斷處理程序(EINTl)并設置上沿觸發變量,在中斷中設置一全局變量i,用i++累加。設置定時器timer0,使它O.36 s產生1次內部定時器中斷。當一個定時器周期完成時引發定時器中斷,在timer0中斷中讀出i的值,即得到O.36 s內碼盤轉動所產生的脈沖數;接著將i清零,為下一個定時器周期捕獲脈沖作準備。此時timer0自動重載,下一次碼盤計數開始。
1.3 測量精度分析
智能機器人選用的光碼盤精度為256線,即256脈沖/轉。電機減速比為1:71,車輪半徑R為6 cm,車輪間距為41.1 cm。車輪轉一圈所產生的脈沖數n=71×256=18 176,可以得到每個脈沖之間的距離d=27πR/n=2×3.14×0.06/18 176=0.207×10-4m,即每個脈沖對應的控制精度達0.02 mm。考慮到負載變化(例如負載變化車輪變形等機械誤差)的影響,理論值與實際值會出現誤差,因此在控制精度d前乘以一個修正系數k。表2為機器人直線行走的實驗數據。可以看出,k為1.10誤差較小,最接近真實值,因此該值就是所需的比例系數。
2 速度調節
一般的PID調節,當偏差E較大時(如啟動或大幅度提速時),由于積分的作用會產生很大的超調量,使系統振蕩,因此選用積分分離的方法,開始時取消積分作用,直到被調量相差不多時才引入積分作用。具體步驟如下:
①設定一個值a>0,E(m)一R(m)一M(m),其中R(m)為給定值,M(m)為測量值;
②當E(m)≥a時,采用PD控制,可以避免過大的超調,又可以使系統有較快的響應;
③當E(m)≤n,即偏差值E(m)比較小時,采用PID控制,可以保證系統的精度。

使用積分分離方法后顯著降低了被控變量的超調量并縮短了過渡時間,使調節性能得到改善。
3 驅動設計
本系統的驅動設計如圖2、圖3、圖4所示。


設備驅動程序是操作系統內核與機器硬件之間的接口。它作為應用和實際設備之間的軟件層,為應用程序屏蔽了硬件的細節。對于應用程序,硬件設備只是一個設備文件,應用程序可以像操作普通文件一樣對硬件設備進行操作。設備驅動程序是Linux內核的一部分,它實現以下的功能:對設備初始化和釋放,把數據從內核傳送到硬件和從硬件讀取數據,讀取應用程序傳送給設備文件的數據和回送應用程序請求的數據,檢測和處理設備出現的錯誤。用到的結構如下:
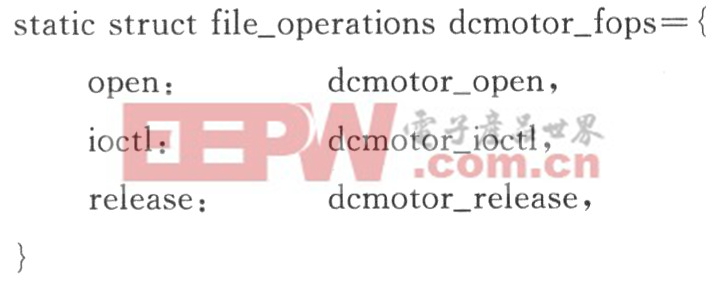
設備打開的時候就會調用dcmotor__open函數進行申請中斷號。帶內存管理的單元的地址映射,設置B端口的2、3引腳為PWM輸出,端口D配置為電機使能剎車制動引腳。


以下所有的函數都是在ioctl()中實現的。在Dcmo―tor_Start里調用timer0_2_3_start(),設置timer0為接收兩路電機的碼盤信號,并檢測電機速度;timer2、timer3提供2路PWM輸出,并設置定時器自動重載。具體實現如下:

Select_Speed可以動態選擇要運行的速度。它是用戶的接口,用戶可以調用該函數把速度值傳到驅動從而控制電機。例如,在應用程序中執行ioctl(fdl,

timer0中斷是核心程序,它可根據PID的調節值來改變占空比。為了便于隨時改變占空比的值可定義兩個全局變量tmp2、tmp3,通過把它們的值寫入TCMPB來改變占空比。

在All_Forward、All_Back、All_Stop中,通過設置端口DO~3的高低電平,實現前進、后退、停止;在Left_Curve、Right_Curve中,設置左右輪的旋轉方向,使兩輪旋轉方向不同,再根據差速在應用程序中給定預定時間,以達到轉彎效果。
4 結 論
利用ARM和Linux操作系統實現智能機器人的閉環控制是可行的,而且可以充分利用ARM的強大功能實現其他智能模塊的擴展。









評論