基于GPS/北斗衛(wèi)星技術(shù)的無(wú)盲區(qū)車輛調(diào)度系統(tǒng)

出現(xiàn)調(diào)度信息時(shí),車載GPS接受機(jī)接受GPS衛(wèi)星的定位數(shù)據(jù),計(jì)算出自己的地理位置經(jīng)緯度坐標(biāo),然后通過(guò)車載臺(tái)的GSM模塊將位置、狀態(tài)、報(bào)警信息發(fā)送到控制中心,并存入數(shù)據(jù)庫(kù);當(dāng)不能捕捉GSM信號(hào)時(shí),啟用北斗衛(wèi)星定位系統(tǒng),該系統(tǒng)具有定位和通信雙重功能,將車輛的位置、狀態(tài)等信息通過(guò)衛(wèi)星系統(tǒng)發(fā)送到控制中心。
3.2 車載單元介紹
車載單元分為GPS部分和“北斗”部分。
GPS車載設(shè)備選用GSM/GPS一體機(jī),配有標(biāo)準(zhǔn)串口,可輸出NEMA-0183 標(biāo)準(zhǔn)GPS 定位數(shù)據(jù),另外車載設(shè)備可進(jìn)行語(yǔ)音通話和數(shù)據(jù)通信,通常情況下,車載臺(tái)通過(guò)GSM短信的方式和控制中心聯(lián)系。
“北斗”部分選用車載型用戶終端,其技術(shù)指標(biāo)為:
波束寬度:俯仰方向:25°~90°;水平方向0°~360°;
頻率:采用L/S波段發(fā)/收,抗雨衰能力強(qiáng),對(duì)雨霧衰減小于0.3dB;
接收頻道數(shù):≥2;
首次捕獲時(shí)間:≤4秒;
失鎖重捕時(shí)間:≤1秒;
接收信號(hào)誤碼率:≤10-5;
發(fā)射EIRP值:≥13 dBW;
發(fā)射頻率偏移:≤2×10-7;
發(fā)射信號(hào)功率穩(wěn)定度:
±0.5dB(一次最長(zhǎng)發(fā)射信號(hào)周期);
±1 Db(24小時(shí),工作環(huán)境條件);
發(fā)射信號(hào)載波抑制:≥30 dB;
功耗電源:直流10~32V 紋波≤1%,具備電源邏輯控制功能;
待機(jī)休眠狀態(tài)功耗:300mW;
平均功耗:≤6W;
最大發(fā)射功率:≤20W;
在能接收到GSM信號(hào)時(shí),車載單元的信息(位置以及其他請(qǐng)求服務(wù)信息)通過(guò)GSM網(wǎng)絡(luò)傳遞GPS定位信息和發(fā)送消息;在接收不到GSM信號(hào)時(shí),利用“北斗”系統(tǒng)的定位通信功能,安裝在移動(dòng)目標(biāo)上的北斗用戶機(jī)通過(guò)衛(wèi)星向定位總站發(fā)出定位申請(qǐng),定位總站根據(jù)所收到的兩顆衛(wèi)星信號(hào),計(jì)算出目標(biāo)位置的經(jīng)度和緯度,并通過(guò)衛(wèi)星傳回到用戶機(jī),用戶機(jī)得到位置信息,同時(shí),該用戶機(jī)所屬的指揮機(jī)也得到該位置信息。指揮機(jī)把該位置信息直接傳輸?shù)脚c之相連的定位數(shù)據(jù)服務(wù)器、GIS服務(wù)器,在電子地圖上顯示該車輛位置。監(jiān)控中心人員根據(jù)直觀的圖文信息對(duì)車輛實(shí)施有效的調(diào)度和監(jiān)控,通過(guò)以上過(guò)程完成從移動(dòng)車輛到用戶指揮控制中心的數(shù)據(jù)通信。
3.3 控制中心介紹
本系統(tǒng)采取主控制中心+受理臺(tái)相結(jié)合的C/S結(jié)構(gòu)聯(lián)合控制的工作模式。主控制中心由數(shù)據(jù)庫(kù)子系統(tǒng)、通信子系統(tǒng)、呼叫受理子系統(tǒng)組成;受理臺(tái)包括通信子系統(tǒng)、GIS子系統(tǒng)主控制中心和各受理臺(tái)通過(guò)專線組成計(jì)算機(jī)網(wǎng)絡(luò),互相交換數(shù)據(jù)、共享信息,實(shí)現(xiàn)群體調(diào)度、聯(lián)網(wǎng)報(bào)警、絕對(duì)保證安全的高要求。
控制中心結(jié)構(gòu)如圖2所示。本文引用地址:http://www.104case.com/article/152497.htm
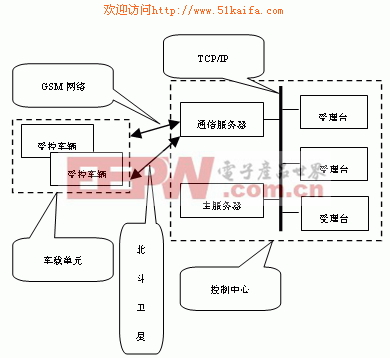
圖2 控制中心結(jié)構(gòu)框圖












評(píng)論