基于嵌入式技術和CAN總線的車輛配電系統

該系統采用實時多任務操作系統μC/OS-Ⅱ作為配電管理器端的軟件平臺,μC/OS-Ⅱ源代碼開放、內核小、移植方便,易于開發。并且該操作系統支持多任務并發運行,可以采用多任務編程方法。這樣,配電管理器端的每個功能可以作為一個獨立的任務來實現,這大大地增強了系統軟件的可靠性、穩定性,也便于以后的維護和升級。同時配電管理器也提供了圖形用戶接口,結合鍵盤、LCD液晶顯示和觸摸屏模塊為用戶提供友好的人機交互界面。
2.2.1 配電管理器應用軟件設計
系統的工作流程主要是說明各個任務是如何協調工作。整個系統的運行過程如圖3所示。本文引用地址:http://www.104case.com/article/152423.htm
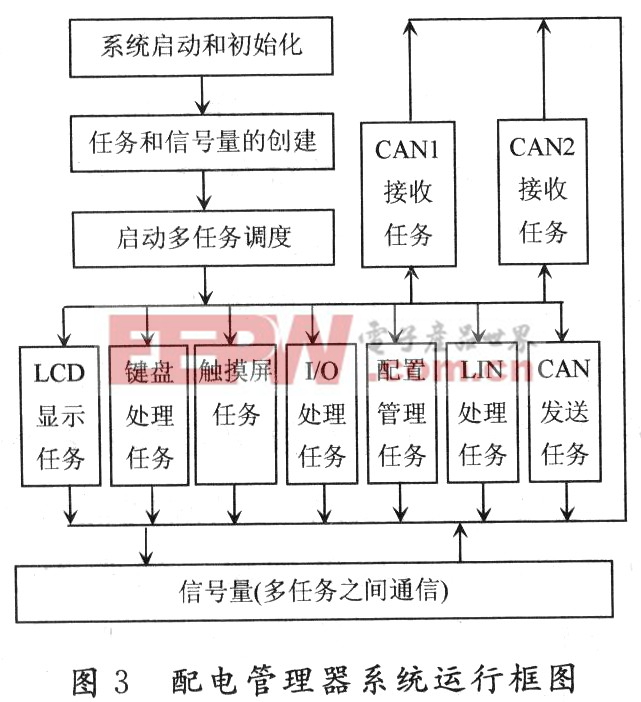
嵌入式配電管理端的軟件主要實現設備參數的讀取和設定、人機交互功能、用電設備的監控功能、CAN、LIN通信數據傳輸等功能。設備參數的讀取和設定功能提供了現場對設備參數的修改,也可以通過遠程監測終端來修改。但是遠程監控終端必須通過許可認證。認證的信息和設備參數保存在鐵電FLASH存儲器中,以便系統掉電后用戶許可的信息不丟失。人機交互功能提供給用戶監控現場設備的運行狀態。該系統采用了4×4鍵盤、觸摸屏和LCD顯示作為系統信息的輸入和輸出接口,為用戶提供非常友好的圖形用戶界面。用戶可以通過人機交互接口對用電設備進行操作。
2.2.2 雙CAN冗余實現的機制和原理
為了保證整車電氣系統的數字化管理的穩定性和可靠性,在配電系統的對外通信接口采用性能穩定、工作可靠的CAN總線,同時,為了保證整車電氣系統通信的可靠性和異常的處理,配電系統采用雙冗余CAN總線。雙CAN冗余通信流程圖如圖4所示。

CAN總線通信程序包括數據傳輸和總線管理兩個功能塊。數據傳輸模塊實現的功能包括CAN初始化、CAN濾波的設計、CAN報文發送和CAN報文接收。
總線管理功能塊實現的功能主要是總線檢測,判斷CAN是否存在故障,若有故障,則進入另一路總線檢測;若冗余總線良好,則采用冗余總線通信。
CAN的通信數據分為命令數據的接收、命令的響應以及故障狀態的自動上報。
命令數據的接收和處理主要接收車輛其他管理終端的命令,執行用電設備的綜合管理。同時,配電管理器響應其他管理終端的執行結果和用電設備的運行狀態。在配電管理器檢測到用電設備故障時,自動上報給其他管理終端,以便實現車輛配電的綜合管理和數字化。同時可以設定用電設備的優先級,配電管理器按照設定的優先級合理控制用電設備。
在向其他管理終端發送報文時,按CAN協議格式將報文內容填入CAN發送緩沖區,啟動發送命令,將報文發送出去。如果不能成功發送,則進行總線故障處理,等待超時后自動調用冗余通道,用冗余通道來發送。如果冗余通道也出現故障,則進人故障處理,故障報警并退出。
3 結 語
該智能配電系統彌補了傳統車輛配電系統的不足,利用嵌入式技術和雙CAN冗余和LIN總線,同時結合LCD控制器和觸摸屏為用戶提供了友好的圖形用戶接口,利用μC/OS-Ⅱ實時多任務操作系統對任務進行合理的調度,實現整車配電系統的數字化和智能化,產品已經應用在特種車輛上,運行結果證明其性能穩定、可靠。








評論