一種基于ARM的嵌入式網關系統設計與實現

2 協議轉換流程
當CAN總線上的設備向Ethernet網發送數據時,嵌入式網關將接收到的CAN數據包解析,提取數據域中的內容;然后按照TCP/IP協議進行封裝,嵌入式網關將經過封裝的數據發送給以太網控制芯片RTL8019AS。由RTL8019AS自動給這些數據添加以太網物理層和邏輯鏈路層所需的相關信息,通過物理接口傳送到以太網。反之,當以太網向CAN總線上設備發送TCP/IP數據包時,它首先將數據發送到RTL8019AS,嵌入式網關從RTL8019AS中接收到數據后,提取實際要傳送的數據,然后封裝成CAN總線數據格式,通過CAN總線將數據發送到網絡中的現場設備。
嵌入式網關硬件必須具有以太網接口和CAN總線接口,而軟件要有TCP/1P協議棧和CAN總線驅動程序;通常嵌入式Linux內核中有完整的TCP/IP協議棧。由于REALTEK公司支持Linux的開發,Linux系統中已含有RTL8019AS芯片的通用驅動程序,CAN總線協議驅動并不是標準配置。因此,設計CAN總線接口及其編制驅動程序是實現嵌入式網關最主要的工作。
3 CAN驅動程序設計
Linux驅動程序屬于Linux內核的一部分,是嵌入式系統控制硬件的接口,它為用戶屏蔽設備的工作細節,并向用戶提供透明訪問硬件設備的機制。驅動程序的開發在嵌入式系統開發中具有舉足輕重的地位。開發出穩定、完備的驅動程序可提高整個系統的性能。
3.1 CAN驅動程序流程
MCP2510的內部結構框圖如圖2所示。
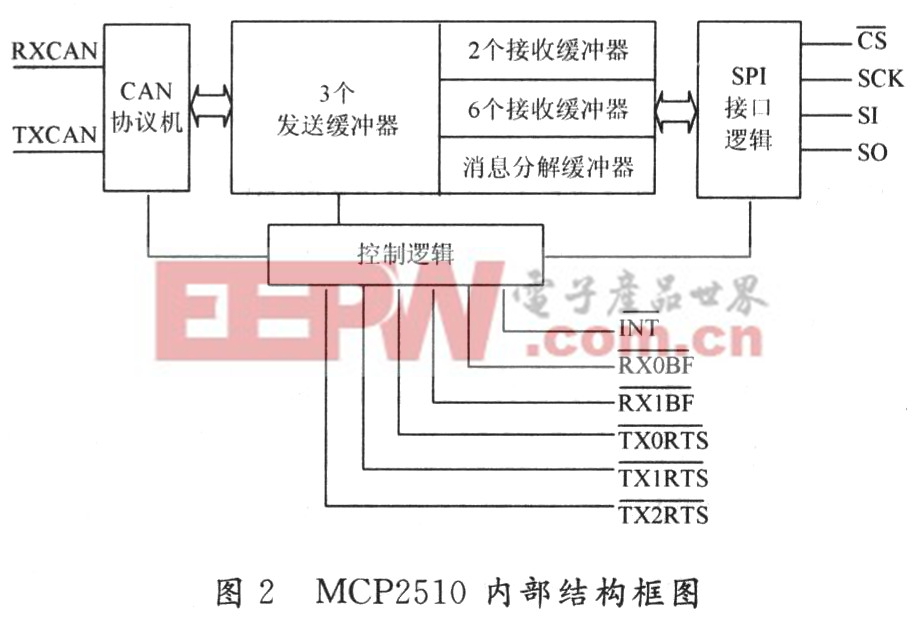
MCP2510內含3個發送緩沖器和2個接收緩沖器,同時還具有靈活的中斷管理能力。CAN協議機負責與CAN總線的接口,SPI接口邏輯用于實現同MCU的通信,而寄存、緩沖器組與控制邏輯則用來完成各種方式的設定和操作控制。
在Linux多任務操作系統中,CAN總線通信程序的設計可分為發送數據模塊、接收等待模塊和中斷處理模塊實現。系統中CAN總線的數據發送和接收是兩個不同的線程。在驅動程序中建立數據發送和接收緩沖區。中斷處理程序只負責填充(或讀取)緩沖區中的數據,然后喚醒等待接收(或發送)數據的任務。數據的發送與接收都通過獨立的緩沖區,并由中斷來實現。操作系統的中斷響應時間在軟件上決定了CAN總線數據的最快收發速度。
3.2 CAN設備驅動程序的實現要點
3.2.1 CAN設備驅動操作函數
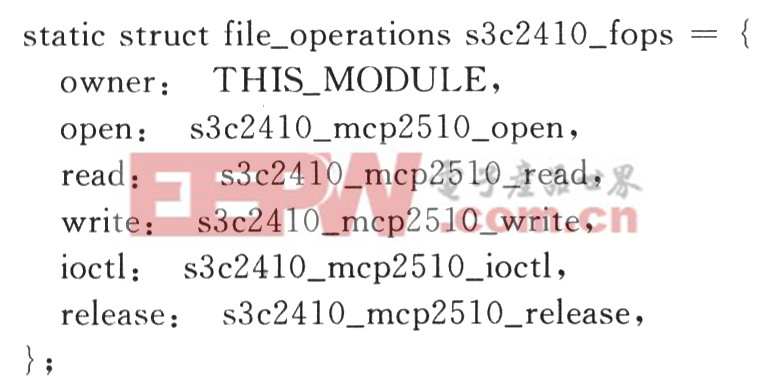
CAN設備驅動程序最終提供給應用程序的是一個流控制接口,主要包括:open,realse,read,write,ioctl等操作。添加設備驅動程序,實際上就是給上述操作編寫相應的程序代碼。驅動程序加載到內核時,會首先運行驅動程序的初始化函數,然后等待系統調用在file_operations數據結構中定義的相關函數,實現對設備的操作。系統使用Linux 2.4.18版本,其文件系統接口被寫義為:
s3c2410_mcp2510_open負責對將要進行的I/O操作做好必要的準備工作,主要包括限制CAN打開次數、清空3個發送緩沖區和2個接收緩沖區等。
s3c2410_mcp2510_write將要發送的數據通過SPI總線將數據傳送MCP2510的發送緩沖器,再通過MCP2510將數據發送到CAN總線。








評論