基于CAN總線與以太網(wǎng)的嵌入式網(wǎng)關(guān)設計

(1)晶振電路的問題。89C55和SJA1000都應該有各自獨立的晶振電路,不能夠用SJA1000的時鐘輸出信號CLKOUT來驅(qū)動單片機。
(2)復位引腳的問題。雖然SJA1000的復位是低電平,但不能通過一個非門直接連接單片機的復位引腳。一般對解決復位引腳問題有兩種方式:第一種是使用單片機的I/O引腳控制SJA的復位引腳,其好處是單片機可以完全控制SJA的復位過程;第二種是采用適當?shù)膹臀恍酒瑸榱私档统杀荆?a class="contentlabel" href="http://www.104case.com/news/listbylabel/label/設計">設計采取的是第一種方法。
(3)RX1引腳的電位必須維持在約0.5 VCC上,否則將不能形成CAN協(xié)議所要求的邏輯電平。
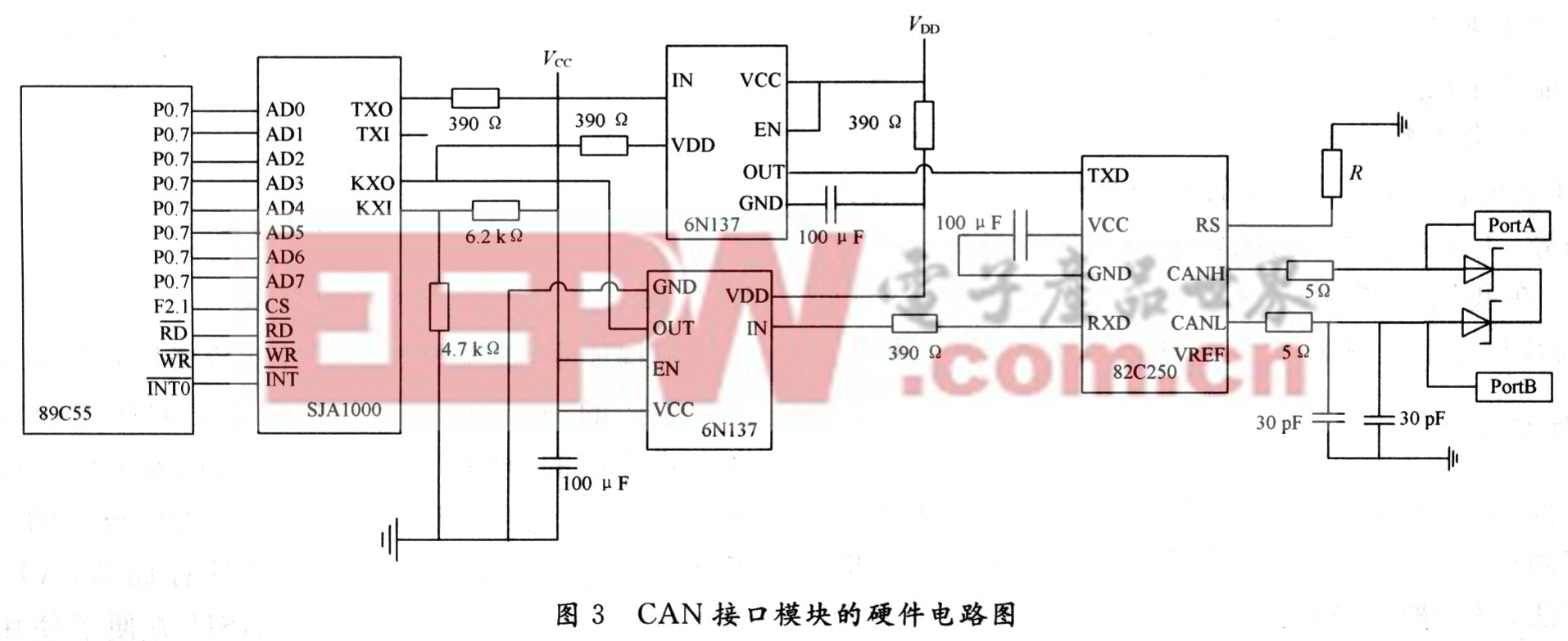
(4)一定要注意電纜的終端阻抗匹配,它直接影響CAN總線是否能正常工作和網(wǎng)絡性能。CAN接口模塊的硬件電路圖見圖3,在PCA82C250的RS腳上接有一個斜率電阻R,可根據(jù)總線通信速度適當調(diào)整電阻的大小。本文引用地址:http://www.104case.com/article/152371.htm
2 通信模塊軟件設計
2.1 SJA1000驅(qū)動程序的實現(xiàn)
SJA1000驅(qū)動程序是由SJA的初始化函數(shù)、發(fā)送函數(shù)、接收函數(shù)組成的,圖4所示為其流程圖。

(1)SJA1000的初始化。SJA1000在系統(tǒng)上電、硬件復位或主控制器發(fā)出復位命令后需要進行初始化,以設定它的工作模式、通信速率、輸出控制方式和標識符屏蔽格式等重要參數(shù)。CAN控制器SJA1000的初始化只能在復位模式下才能完成。程序的流程圖如圖4所示。
首先程序檢測CAN接口是否正常工作,即向SJA1000的測試寄存器寫入并讀出,校驗其結(jié)果是否一致,如果結(jié)果一致則進入復位模式進行初始化設置。在初始化的過程中,如果對某個寄存器的設置超過規(guī)定的時間還未完成,則認為初始化失敗,初始化程序自動發(fā)送錯誤信號。
(2)數(shù)據(jù)的發(fā)送與接收。SJA1000芯片有一個報文發(fā)送緩沖區(qū)和兩個報文接收緩沖區(qū),用于CAN報文傳送。數(shù)據(jù)從CAN控制器SJA1000發(fā)送到 CAN總線首先是由CAN控制器自動完成的,發(fā)送數(shù)據(jù)程序把數(shù)據(jù)存儲區(qū)中待發(fā)送的數(shù)據(jù)取出,組成信息幀,并將主機的ID地址填人幀頭;然后將信息幀發(fā)送到 CAN控制器的發(fā)送緩沖區(qū);最后啟動發(fā)送命令即可。信息從CAN總線到CAN接收緩沖區(qū)也是由CAN控制器自動完成的。接收程序只需從接收緩沖區(qū)讀取要接收的信息,并將其存儲在數(shù)據(jù)存儲區(qū)即可。







評論