基于ARM的嵌入式服務機器人控制器的研究

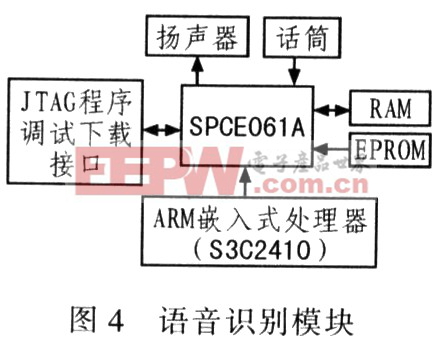
人機交互模塊采用液晶(LCD)觸摸屏及語音交互接口。S3C2410內置有液晶控制器,可以支持最大256 K色的TFT彩色液晶屏、最大4 K色的STN彩色液晶屏,這里選用LQ080V3DG01型8英寸640x480 TFT液晶屏,該液晶屏上配有4線電阻式觸摸屏,用于檢測屏幕觸摸輸入信息,有利于提高人機交互的友好性;而語音識別南凌陽公司的SPCE061A完成,該器件是一個16位結構的高集成的微控制器,內部集成有MCU、A/D轉換器、D/A轉換器、RAM、ROM。具有較高運算速度的16x16位的乘法語音和內積運算指令,CPU時鐘最高可達49 MHz。系統支持10個中斷向量及14個中斷源,具有較強的中斷處理能力,適合實時語音處理。具有雙通道10位A/D轉換器方式的音頻輸出功能,配置帶自動增益控制功能(AGC)的麥克風輸入方式,為語音處理帶來極大便利。圖4為語音識別模塊硬件結構。本文引用地址:http://www.104case.com/article/152328.htm
4 系統軟件設計
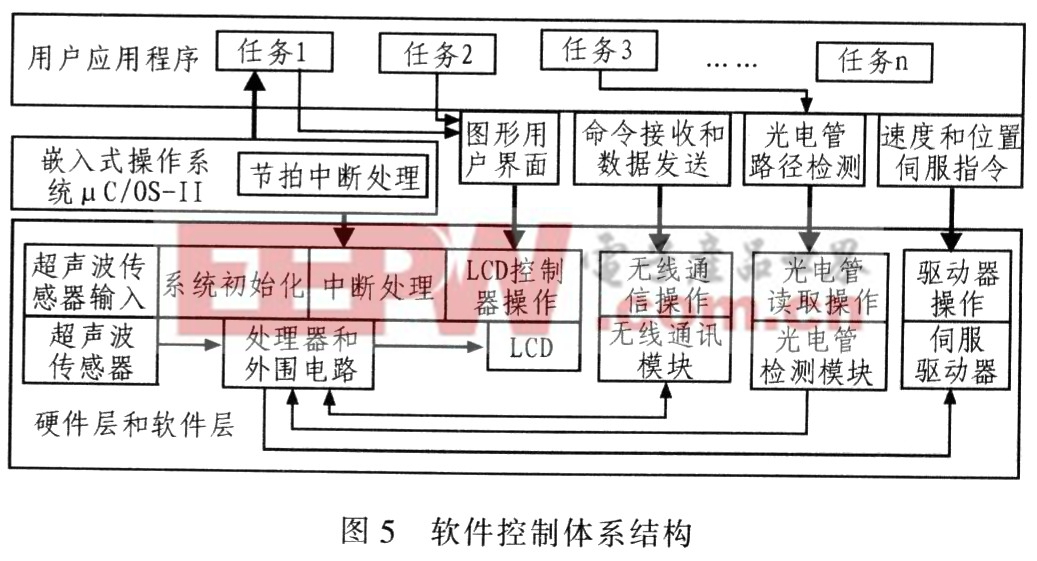
軟件設計的基本原則是:軟件結構化、驅動標準化、系統可定制。服務機器人的控制器關鍵要保證系統的實時性。采用μC/OS-II實時操作系統,其具有結構簡單、容易移植、源代碼公開等優點。使用μC/OS-II實時操作系統開發服務機器人控制軟件就是將整個控制軟件的功能劃分為若干任務,分別加以實現,并以任務問通信方式實現各個任務間的邏輯關系。整個軟件控制體系結構如圖5所示。
5 實驗研究
在搭建機器人軟硬件平臺及編寫與硬件相關的底層函數后,在該實時內核上編寫接口驅動程序及機器人應用程序。通過軟硬件整體測試后,將該機器人控制器安裝在智能輪椅上進行實驗。在實驗過程中。智能輪椅移動穩定,轉向靈活,變速平穩;能及時識別并躲避障礙物;機器人視頻傳輸畫面流暢;語音人機交互功能,由麥克風將聲音傳給語音處理器,通過硬件處理識別語音信號,然后再經南喇叭播放機器人的對答聲音。實現人機對話。同時該服務機器人控制系統結構簡單,電路體積小,有利于安裝與維護。
6 結束語
服務機器人控制系統是機器人的神經中樞,決定著機器人能否按照用戶要求順利地完成相應工作任務。基于 ARM和嵌入式μC/OS-Ⅱ的服務機器人控制系統可廣泛應用于服務型機器人。這必將開發出低成本、低功耗、體積小巧、實時性強、可靠性高、接口豐富、維護方便、智能化程度高的機器人,也將促進機器人運用的普及和推廣,從而推進我國機器人行業向產業化方向發展。







評論