基于ARM9的快速對星裝置設(shè)計與實現(xiàn)

0 引 言
大中型衛(wèi)星站均具有相應(yīng)的、完善的天線跟蹤伺服系統(tǒng),天線伺服跟蹤系統(tǒng)依據(jù)信標信號強弱,決定天線轉(zhuǎn)向,驅(qū)動天線旋轉(zhuǎn),達到準確對星。隨著通信技術(shù)和電子技術(shù)的發(fā)展,小型衛(wèi)星站如車載站、便攜站受機動性能和便攜性能的局限,不可能采用大中型衛(wèi)星站才能使用的伺服跟蹤系統(tǒng),采用不同原理,開發(fā)適用于小型衛(wèi)星站天線的對星裝置,具有現(xiàn)實意義。
1 系統(tǒng)概述
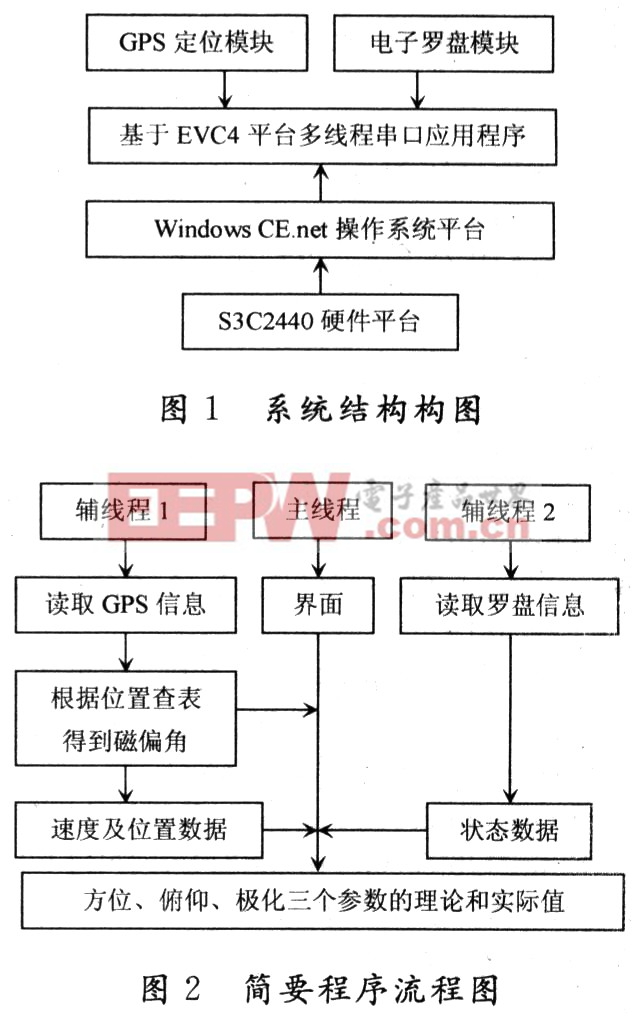
該裝置通過GPS采集地理信息、電子羅盤采集姿態(tài)信息,根據(jù)GPS采集的地理信息,結(jié)合通信衛(wèi)星位置,計算出對星所需要的標準方位、俯仰、極化參數(shù),同時計算出當?shù)亍斈甏牌菙?shù)據(jù);通過采集電子羅盤數(shù)據(jù),得到初步方位、俯仰、極化數(shù)據(jù),其中俯仰和極化均為天線實際指向值,但是方位值是以磁北為標準測量值;通過GPS得到的磁偏角數(shù)據(jù),對從電子羅盤得到的以磁北為標準的方位值進行修正,得到比較準確的、以真北為標準的真實方位數(shù)據(jù)。其系統(tǒng)結(jié)構(gòu)如圖1所示,其中基于EVC4平臺的多線程應(yīng)用程序流程結(jié)構(gòu)如圖2所示。











評論