嵌入式人體步態(tài)自動識別系統(tǒng)

2.2 步態(tài)圖像序列中的光流場
光流是指圖像中模式運動的速度。光流場是一種二維(2D)瞬時速度場,其中的2D速度矢量是景物中可見點的三維(3D)速度矢量在成像表面的投影。光流不僅包含了被觀察物體的運動信息,而且攜帶著有關(guān)景物3D結(jié)構(gòu)的豐富信息。光流法假定相鄰時刻之間的間隔很小(一般為幾十ms),從而相鄰時刻的圖像差異也比較小。
2.2.1 光流的基本等式
光流亮度不變性描述的是圖像上某個象素點的灰度值隨時間的變化率為零,即
 本文引用地址:http://www.104case.com/article/152274.htm
本文引用地址:http://www.104case.com/article/152274.htm 若記 其中u和v是該點的光流的x分量和y分量,則式(1)為
其中u和v是該點的光流的x分量和y分量,則式(1)為
式(2)就為光流計算的基本等式。
2.2.2 光流有關(guān)的計算
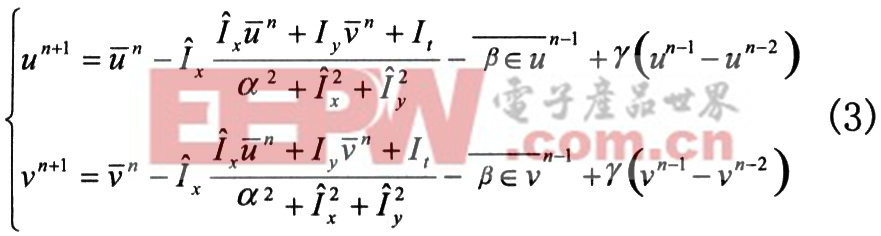
對于圖像上的每一點(xi,yi),求解光流場方程(2),得到由迭代形式表示的解為:
2.3 光流場中運動特征的提取
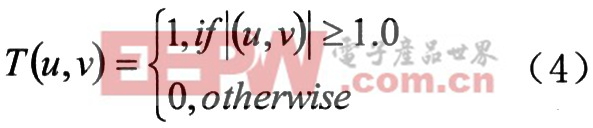
從光流中提取的特征包括運動點T,加權(quán)的運動點|(u,v)|,|u|,|v|,以及光流分布的質(zhì)心特征等。通過光流場,利用T(u,v)將運動點(白色)和非運動點(黑色)區(qū)分開來,由下式表示:
在本實驗中,選取|(u,v)|![]() 加權(quán)橫坐標
加權(quán)橫坐標![]() 作為從光流場中提取的步態(tài)特征。
作為從光流場中提取的步態(tài)特征。
2.4 步態(tài)特征的數(shù)據(jù)融合
對于所提取的步態(tài)特征xuc和yuc,由數(shù)據(jù)融合算法D-S合成公式:
其中m1和m2是特征空間上的兩個mass函數(shù),![]() N為矛盾引子,
N為矛盾引子,
2.5 識別
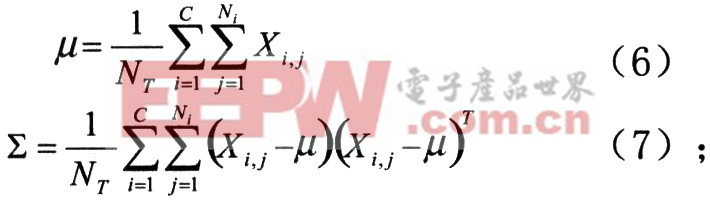
將由數(shù)據(jù)融合得出的特征進行基于PCA的特征空問變換。假設(shè)初始的訓練樣本集為T={pi-j},i=1,2,…,C,j=1,2,…,Ni;第i個人第j個步態(tài)樣本向量為Xij,而樣本總數(shù)為NT=N1+N2+…+Nc。
求樣本集的總體均值向量μ和協(xié)方差矩陣∑,
如果協(xié)方差矩陣∑的秩為N,由det|λI-∑|=0求得矩陣∑的N個特征值λ1,λ2,λ3,…,λN,并由矩陣方程λiI-∑=0,i=0,1,2,…,N;求得對應(yīng)于N個特征值λ1,λ2,λ3,…,λN的N個特征向量e1,e2,e3,…,eN。選取與前K個最大特征值對應(yīng)的前K個特征向量,并使![]() 其中α表示樣本集在前K個軸上的能量占整個能量的百分比。通常取α值接近于1,以使得樣本集在前K個軸上的能量幾乎接近于整個能量。
其中α表示樣本集在前K個軸上的能量占整個能量的百分比。通常取α值接近于1,以使得樣本集在前K個軸上的能量幾乎接近于整個能量。
用式(2)中所求得K個特征向量重建初始樣本集中的每個樣本。算法如下:

這樣就得到一個K維的權(quán)向量Ωi,j用于進行識別。
選取最近鄰分類法進行步態(tài)模式分類。設(shè)經(jīng)過特征提取并向特征空間投影,所得到的特征向量為Ω,求得Ω與每個每個模式類的平均向量Ω i,j之間的歐幾立德距離。

其中
由最近鄰分類法的判決準則可知,當εi(x)的值最小時,則x∈εi;否則x∈εi。







評論