基于嵌入式Linux的晶體生長控徑系統的研究

圖3為圖像測量過程,圖像經邊界捕捉,獲得半橢圓弧圖形,再通過己知的拍攝角度,將此橢圓的半圓弧還原為圓形的半圓弧,然后將此半圓弧擬合成圓弧,在圓弧上捕捉出最大直徑位置,通過亞像素原理獲得此直徑的像素值。

捕捉最大直徑時,通過預先設定的捕捉位置(見圖3)獲得當前AB距離值,將捕捉位置通過2分法上移,得到一個最大AB距離值作為直徑值。依次掃描出5條線,分別為AlBl、A282、A383、A484、A585,相鄰的兩條線相隔2個像素點的距離。設A1Bl~A585到圓心的距離分別為別為h1、h2、h3、h4、h5,圓的半徑為R,則可列出6個方程:

求解該方程組,可得10組半徑值。去除兩組最大值和兩組最小值,對剩余6組半徑值求解平均值,所求平均值即為半徑值R,則所求直徑值D=2R。
5 控件(D/A轉換)設計
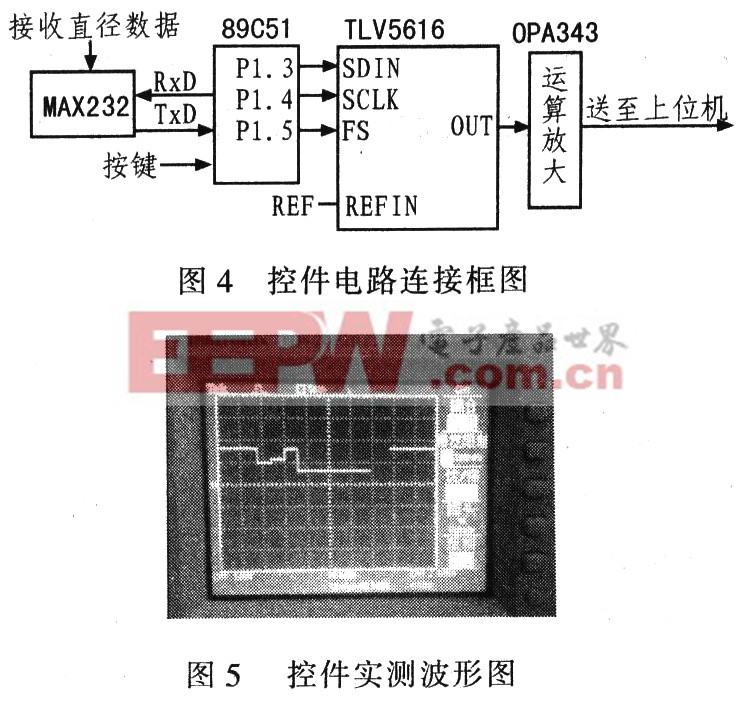
根據上位機具體要求,需為其提供具有特定電平的模擬信號。采用高速高精度TLV5616型D/A轉換器。該器件為12位3μs串行D/A轉換器,采用8引腳的SOIC封裝。TLV5616所要求提供的供電電壓為3~5 V,其最小的參考電壓為2.7 V,由于不具備控制功能,即需要轉換時,把數字信號轉換成模擬信號,故該器件需與5l系列微控制器相配合工作。選用常用的89C5l單片機為其提供DIN,SCLK和FS信號。圖4為控件電路連接圖。由于參考電平較小,為保證其在傳輸過程中不受干擾,故在輸出端加入放大電路。圖5是控件實測波形圖片。
6 結束語
利用嵌入式技術測量并控制直拉法晶體硅棒生長速度,實現測量數據可讀化。通過機器視覺測徑技術取代傳統的Ircon測徑技術,使單晶硅生長測徑更加精確、可靠。








評論