基于ARM微處理器的十回路智能配電監(jiān)控單元的設(shè)計(jì)

3 軟件設(shè)計(jì)
3.1 Modbus通信協(xié)議
本監(jiān)控終端與上位機(jī)之間的通信采用Modbus通信協(xié)議。該協(xié)議是用于電子控制器上的一種通用語言。通過此協(xié)議,控制器相互之間、控制器經(jīng)由網(wǎng)絡(luò)(例如以太網(wǎng))和其它設(shè)備之間就可以通信,該協(xié)議也支持傳統(tǒng)的RS232、RS422和RS485等接口。傳統(tǒng)的Modbus協(xié)議分為ASCII模式和RTU模式,考慮到配電系統(tǒng)的高效性和安全性,這里采用RTU模式。使用RTU模式,消息發(fā)送至少要以3.5個(gè)字符時(shí)間的停頓間隔開始。并在最后一個(gè)傳輸字符之后,應(yīng)通過一個(gè)至少3.5個(gè)字符時(shí)間的停頓來標(biāo)定消息的結(jié)束。一個(gè)新消息可在此停頓后再開始。整個(gè)消息幀必須作為一個(gè)連續(xù)的流來傳輸。如果在幀完成之前,有超過1.5個(gè)字符時(shí)間的停頓時(shí)間,那么,接收設(shè)備將刷新不完整的消息并假定下一字節(jié)是一個(gè)新消息的地址域。同樣地,如果一個(gè)新消息在小于3.5個(gè)字符時(shí)間內(nèi)接著前個(gè)消息開始,則接收設(shè)備也將認(rèn)為它是前一消息的延續(xù),而這將導(dǎo)致一個(gè)錯(cuò)誤,但該錯(cuò)誤可以利用CRC校驗(yàn)來發(fā)現(xiàn),其典型的RTU消息幀如表l所列。本文引用地址:http://www.104case.com/article/152242.htm

3.2 軟件設(shè)計(jì)
本設(shè)計(jì)采用C語言在keil C平臺(tái)上來編寫操作軟件,以完成上位機(jī)(PC機(jī))與終端間的相互通信。系統(tǒng)軟件主要包括主程序、初始化程序、ATT7022B復(fù)位程序、SPI通訊程序、數(shù)據(jù)采集序、數(shù)據(jù)發(fā)送程序、以及中斷程序等。圖6所示是其軟件程序主流程。

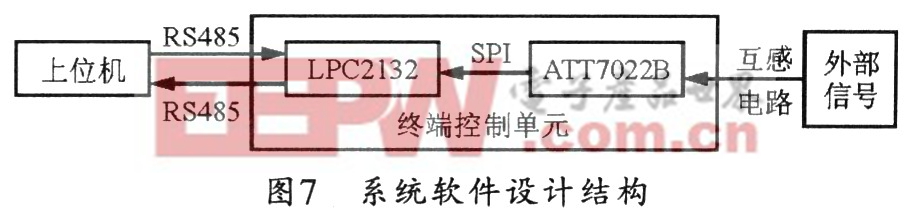
系統(tǒng)中的上位機(jī)通過RS485串口與系統(tǒng)通信,其功能芯片ATT7022B也利用串行模式與系統(tǒng)控制核心LPC2132相互交流數(shù)據(jù),圖7所示為本系統(tǒng)的軟件設(shè)計(jì)結(jié)構(gòu)。
4 結(jié)束語
數(shù)字化、網(wǎng)絡(luò)化的電力監(jiān)測是工業(yè)遠(yuǎn)程監(jiān)控與監(jiān)測的必然趨勢,也是工業(yè)遠(yuǎn)程監(jiān)控的最佳選擇,在今后一段時(shí)間,高效、快速、準(zhǔn)確、安全的電力遠(yuǎn)程控制監(jiān)測系統(tǒng),即智能電力監(jiān)測系統(tǒng)仍是我們研究的主要對象。本文以LPC2132微處理器為核心,給出了測量有功、無功、視在功率、雙向有功和四象限無功電能、LCD顯示、備自投功能的電能監(jiān)控單元的硬件電路。下階段的工作將是為系統(tǒng)配置功能軟件,調(diào)試系統(tǒng),以使系統(tǒng)可以安全、有效的運(yùn)行于現(xiàn)場生產(chǎn)之中。











評論