基于DSP的EASI十二導聯多功能Holter系統

右腿驅動電路是專為克服50 Hz工頻共模干擾、提高共模抑制比(CMRR)而設計的,原理是采用以人體為相加點的共模電壓作并聯負反饋,其方法是提取前級放大電路中的共模電壓,經驅動電路倒相放大后再加回人體右腿上。本文使用的EASI導聯系統可以把RL電極接到右腹處。
2.4 TMS320VC5509A最小系統
Holter是便攜式設備,要求保證至少有24小時連續的醫學應用,同時要運行心電檢測等復雜算法。因而作為系統核心的DSP必須具備低功耗和高性能的特點。本文使用TMS320VC5509A作為系統運算和控制核心,系統配置DSP的McBSP接口與模數轉換芯片ADS8325和CC2430 Zigbee模塊進行通信,通過SD控制器與MicroSD卡連接,通過GPIO口與液晶模塊相連接,設置3個由按鍵控制的外部中斷,用于多功能切換。
3 軟件設計
3.1 DSP程序設計
DSP系統初始化需要完成以下操作:初始化CPU、外設、引腳功能與中斷,通過判斷中斷源確定是否存儲在MicroSD卡上;然后開始A/D轉換采集心電信號,根據此前所選擇的方式通過DMA保存采集到的數據;同時數據累積到特征提取所需后對其進行處理,判斷是否有異常。一旦產生異常,則通過Zigbee模塊發送提示信息,否則繼續循環信號處理流程。
3.2 算法設計
ECG信號中QRS波群的檢測是對ECG信號自動分析診斷的前提和基礎,只有在R波標定后才可做進一步分析。本系統采用墨西哥草帽小波變換進行R波檢測。該小波母函數是高斯函數的二階導數,心電信號的特征點與小波變換的模極大值點存在對應關系,從而可以據此實現R波的定位[5]。式(1)為小波母函數函數表達式:
具體檢測方法為:在小波變換尺度4上,分等長區間分別求模極大值,再對這組模極大值求均值,將該均值二分之一作為閾值,求出過閾值的連續區間中極大值為R波的相應位置,再修正時移。此時與尺度4相應時延為20點,即與原始信號中R波位置有20點的延時。
為了檢查算法的有效性,本實驗采用國際通用的MIT-BIH數據庫進行測試,結果如表1所示。
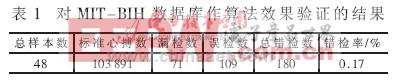
經實驗驗證,由于噪聲在小波變換的第3、第4尺度上已得到抑制,所以系統中所采用的方法可以有效地從噪聲干擾中識別出心電信號中R波的位置,并且識別準確率達到了99.83%。
在完成R波識別流程后,分別以R波位置為起始點,向前在長度為0.04 s的區間中搜索模極小值點位置,以對Q波進行定位。對S波進行識別的基本流程與Q波相似,不同點是向R波后向檢索,并且由于S波延續時間較Q波長,搜索區間長度為0.06 s。
3.3 上位機軟件設計
本文的心電遠程實時監護界面采用LabVIEW虛擬儀器編程語言設計,主要功能為實時從串口采集心電數據,切換顯示十二導聯數據,分析和存儲等功能。
本系統中,Holter終端節點采集分析的數據應用ZigBee無線協議傳輸至網絡協調器節點。網絡協調器節點將接收到的用戶信息數據進行融合處理,通過串口傳送到PC機上[6]。
4 系統測試
4.1 心電采集和預處理
按照圖1的EASI導聯系統電極位置所示,通過心電電極片連接人體和系統前端電路,采集心電信號。圖3為實際采集的AI通道的心電信號并在CCS(Code Composer Studio)v3.3上顯示的心電信號片段。
4.2 算法實現
在TMS320VC5509A采用小波變換的方法,在小波變換尺度4上對心電信號進行實時特征提取,并對QRS波群的各個特征點參數進行檢測計算。小波變換尺度4如圖4所示。

如圖4所示,圓圈標記為R波在尺度4上對應的位置,三角形標記為Q波,矩形標記為S波。然后據此再對其他參數如P波、T波及其端點檢測。
4.3 遠程監護
在上位機運行心電遠程實時監護界面,可同時實時顯示用戶的心電數據及根據EASI導聯推導出的十二導聯數據。
本文實現了一個基于DSP的多功能Holter系統。硬件系統、EASI十二導聯心電采集電路、心電識別算法、Zigbee無線傳輸通信和上位機監護程序等都已調試成功。Holter系統能實現基于小波變換算法實時檢測從心電模擬前端采集的心電信號,并通過Zigbee實時無線傳輸到PC機進行心電遠程實時監護與十二導聯心電數據的推導及實時顯示,達到預期目標。









評論